
JAK SIĘ OBLICZA NIEPEWNOŚĆ POMIARU?
Kolejnym punktem na świadectwie wzorcowania jest informacja o tym, że na kolejnych stronach dokumentu podano wyniki kalibracji razem z wartościami niepewności pomiaru. Jeżeli zlecenie przewidywało jedynie sprawdzenie, czy przyrząd pomiarowy spełnia wymagania metrologiczne określone w przepisach, normach albo w innych zaleceniach, potwierdzenie zgodności zastępuje wyniki wzorcowania.
Niepewność pomiaru charakteryzuje rozrzut wartości, które można przypisać wielkości mierzonej. Ta podawana w świadectwach kalibracji to niepewność rozszerzona obliczana jako wynik mnożenia złożonej niepewności standardowej pomiaru wielkości wyjściowej i współczynnika rozszerzenia k. Zwykle w czasie wzorcowania spełnione są warunki, które pozwalają na przyjęcie k = 2 (rozkład normalny wielkości mierzonej, wiarygodność niepewności standardowej). Odpowiada to poziomowi ufności około 95%.
Niepewność pomiaru należy obliczać oraz podawać w świadectwie wzorcowania (maksymalnie do dwóch miejsc po przecinku) zgodnie z ujednoliconymi wytycznymi zawartymi w dokumencie EA-4/02 pt. Wyrażanie niepewności pomiaru przy wzorcowaniu udostępnianym przez GUM. W oparciu na nim, na przykładach wzorcowań multimetru cyfrowego, opornika odniesienia, kalibratora temperatury i odważnika przedstawiamy dalej różne źródła niepewności cząstkowej, które składają się na złożoną niepewność pomiaru.
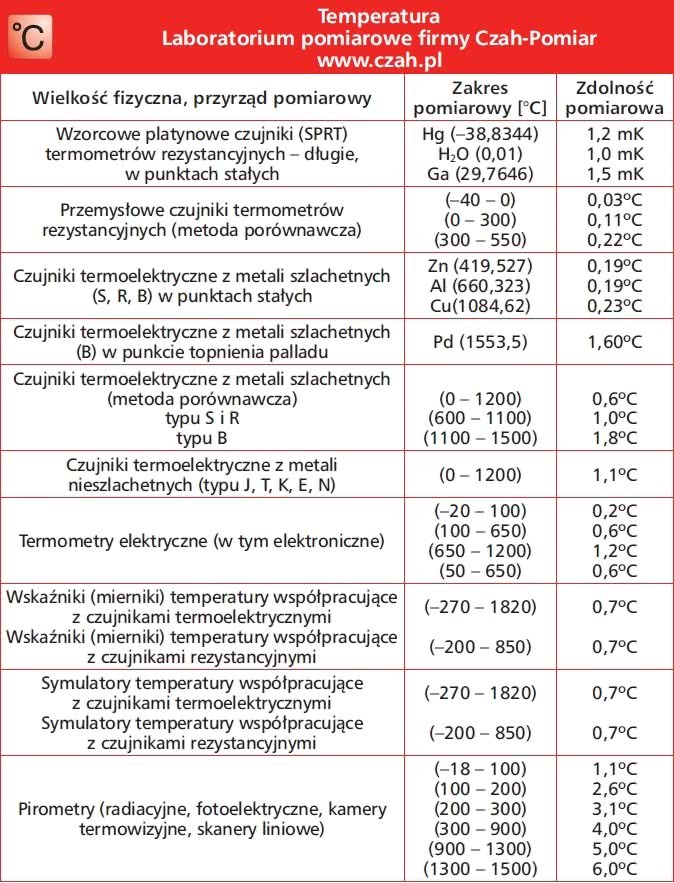
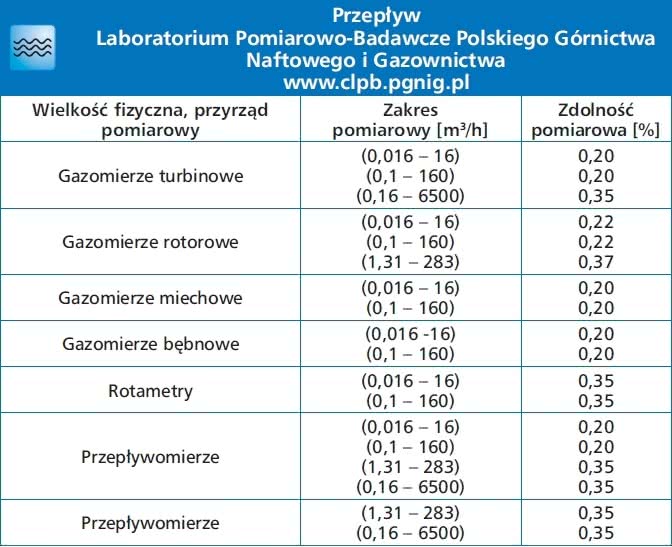
Gdzie wzorcować przyrządy pomiarowe?Poniżej przedstawiamy przykładowe oferty laboratoriów akredytowanych w zakresie wzorcowania przyrządów pomiarowych wybranych wielkości elektrycznych i nieelektrycznych. Lista wszystkich jednostek tego rodzaju przydostępna jest na stronie internetowej PCA www.pca.gov.pl. Można na niej skorzystać z wyszukiwarki według m.in. numeru akredytacji (AP), nazwy laboratorium, miasta, dziedziny lub obiektu kalibracji.
|

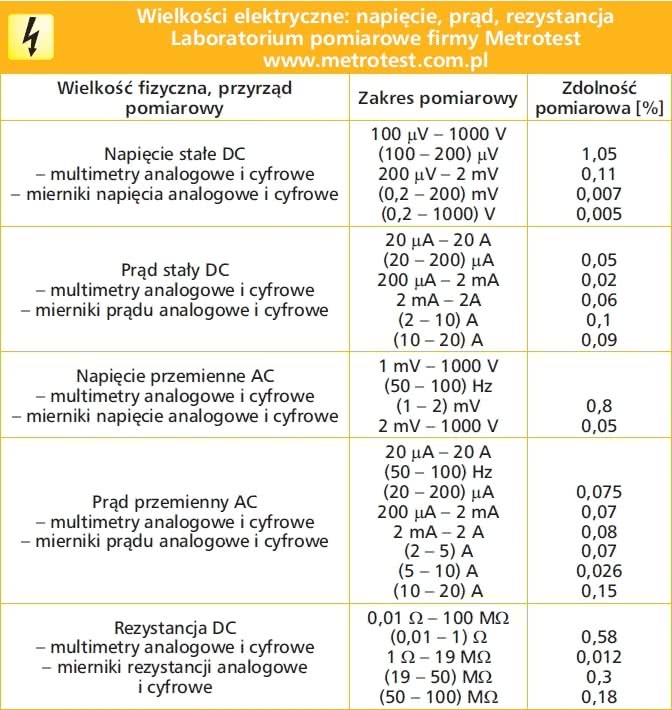
PRZYKŁAD 1 - WZORCOWANIE MULTIMETRU CYFROWEGO
Aby obliczyć błąd wskazań Ex multimetru cyfrowego wzorcowanego z wykorzystaniem kalibratora, należy skorzystać z następującej zależności:
Ex = Uix - Us + ΔUix - ΔUs,
gdzie: Uix to wartość napięcia wskazana przez ten przyrząd, Us - wartość napięcia wytworzonego przez kalibrator, ΔUix - poprawka wskazanej wartości napięcia spowodowana określoną rozdzielczością wskazań multimetru cyfrowego, a ΔUs - poprawka wartości napięcia wzorca uwzględniająca m.in. jego dryft od czasu ostatniego wzorcowania kalibratora, zsumowany wpływ: odchylenia w stanie ustalonym, nieliniowości i zmian współczynnika wzmocnienia, zmiany temperatury otoczenia i napięcia zasilania oraz wpływ obciążenia, tzn. rezystancji kalibrowanego multimetru.
PRZYKŁAD 2 - KALIBRACJA REZYSTORA WZORCOWEGO
Rezystor odniesienia wzorcuje się, porównując wartość jego rezystancji z wartością dla innego rezystora kontrolnego o takiej samej rezystancji nominalnej przy użyciu dokładnego multimetru cyfrowego. Rezystory powinny znajdować się w takiej samej temperaturze. Można je w tym celu na przykład umieścić w kąpieli z medium o monitorowanej i regulowanej temperaturze.
Rezystancja opornika badanego Rx jest wyznaczana z równania:
Rx = (Rs + ΔRd + ΔRts)·r·rc - ΔRtx,
gdzie: Rs to rezystancja wzorcowego opornika, ΔRd - jej dryft od ostatniego wzorcowania, ΔRts - zmiana rezystancji opornika odniesienia spowodowana zmianą temperatury, r - iloraz rezystancji opornika wzorcowanego do rezystancji wzorca, rc - współczynnik poprawkowy na napięcie pasożytnicze i rozdzielczość przyrządu, a ΔRtx - zmiana rezystancji opornika badanego pod wpływem temperatury.
Jak wyznaczyć niepewność pomiaru wielkości wejściowych?W tym celu korzysta się z metody typu A albo metody typu B. W tej pierwszej niepewność standardowa jest odchyleniem standardowym eksperymentalnym średniej otrzymanej metodą uśredniania albo odpowiednią analizą regresji. Stosuje się ją wtedy, gdy istnieje możliwość przeprowadzenia w identycznych warunkach pomiarowych wielu niezależnych obserwacji jednej z wielkości wejściowych. W metodzie typu B niepewność jest obliczana innym sposobem niż analiza statystyczna serii obserwacji. Powinien on być uzasadniony w danych warunkach pomiaru.
|
PRZYKŁAD 3 - WZORCOWANIE KALIBRATORA TEMPERATURY
Wzorcowanie kalibratora temperatury polega na wyznaczeniu temperatury otworu pomiarowego tego przyrządu z wykorzystaniem termometru wzorcowego, na przykład czujnika rezystancyjnego platynowego, którego opór mierzy się przy użyciu mostka prądu przemiennego. Pomiaru dokonuje się w stanie ustalonym, czyli wówczas gdy wewnętrzny termometr kalibratora wykaże osiągnięcie zadanej temperatury. Temperatura otworu roboczego tx jest sumą:
tx = ts + Δts + Δtd - Δtix + Δtr + Δta + Δth + Δtv,
gdzie: ts - temperatura wzorca, Δts - poprawka temperatury wzorca wynikająca z pomiaru jego rezystancji, Δtd - poprawka temperatury wzorca związana ze zmianą jego wartości od czasu ostatniego wzorcowania, Δtix - poprawka spowodowana błędem nastawienia kalibratora, Δtr - poprawka wynikająca z różnic temperatury między termometrem wbudowanym a wzorcem, Δta - poprawka uwzględniająca niejednorodność temperatury w otworze pomiarowym, Δth - poprawka wynikająca z histerezy wskazań, Δtv - poprawka związana ze zmianą temperatury podczas pomiaru.
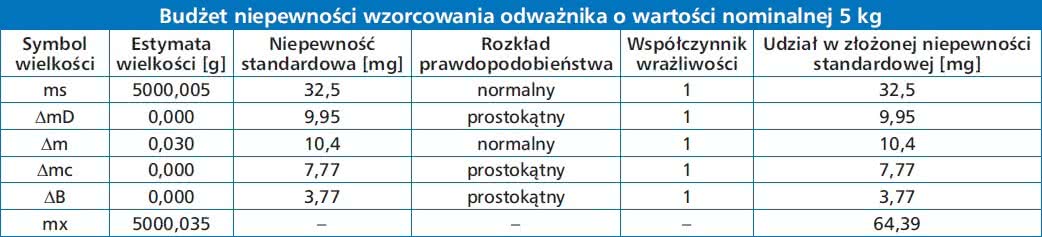
PRZYKŁAD 4 - KALIBRACJA ODWAŻNIKA
Kalibracja odważnika o określonej wartości nominalnej polega na jego zestawieniu ze wzorcem o takiej samej wartości znamionowej przy użyciu komparatora masy. Ta pierwsza (mx) jest dalej obliczana jako suma: masy wzorca (ms) odczytanej z jego świadectwa wzorcowania, jej dryft u (ΔmD) oszacowanego na podstawie jego wcześniejszych wzorcowań, różnicy mas wzorca oraz odważnika badanego (Δm) i poprawek na niecentryczność, wpływy magnetyczne (Δmc) i wypór powietrza (ΔB):
mx = ms + ΔmD + Δm + Δmc + ΔB.
BILANS NIEPEWNOŚCI
Dla każdego ze składników równań podanych w przykładach 1 do 4 wyznacza się niepewności standardowe (patrz ramka). Ich wartości trzeba następnie uwzględnić w bilansie niepewności. Każdej z nich powinno się przypisać współczynnik wrażliwości, który określa, w jakim stopniu zmiany estymaty wielkości wejściowej wpływają na estymatę wielkości wyjściowej. Iloczyn współczynnika wrażliwości i danej niepewności cząstkowej określa udział tej drugiej w złożonej niepewności standardowej pomiaru. Przykład bilansu niepewności dla przypadku wzorcowania odważnika o wartości nominalnej 5 kg przedstawiono w tabeli obok. Niepewność rozszerzona pomiaru dla k = 2 to:
U = 2 · 64,39 ≈ 128,78 mg
Wyznaczona masa odważnika wynosi zatem: 5,000035 kg ± 128,78 mg.
JAK CZĘSTO TRZEBA WZORCOWAĆ PRZYRZĄDY POMIAROWE?
Tematy numerów w APA - plan na kolejne miesiące
O częstości wzorcowań przyrządów pomiarowych, o ile inaczej nie stanowią odpowiednie normy lub przepisy, decydują ich użytkownicy. Aby mieć pewność, że ich wskazania wciąż są wiarygodne, najlepiej byłoby je kalibrować jak najczęściej. Z drugiej strony uwzględnić trzeba koszt tej usługi, zwłaszcza jeżeli korzysta się z wielu czujników. Częstość kalibracji powinna być więc tak dobrana, żeby nadmiernie finansowo nie obciążać zakładu, równocześnie zapewniając odpowiedni poziom bezpieczeństwa produkcji.
W praktyce oznacza to, że przyrządy pomiarowe, których błędy mogą mieć poważne, też finansowe, efekty, należy wzorcować częściej, podobnie jak te o mniejszej niepewności pomiaru oraz nowe. W wypadku tych ostatnich ułatwia to określenie dryft u ich wskazań spowodowanego starzeniem się. Typowy odstęp między kolejnymi kalibracjami czujników w przemyśle mieści się między 12 a 24 miesiącami.
Monika Jaworowska
W artykule wykorzystano informacje podane m.in. przez GUM oraz PCA.















