Windy najczęściej klasyfikuje się ze względu na rodzaj napędu - elektrycznego oraz hydraulicznego. W tych drugich kabinę z ładunkiem wprawia w ruch siłownik hydrauliczny zazwyczaj zasilany przez pompę hydrauliczną napędzaną silnikiem elektrycznym. Aby zatrzymać windę na wybranej wysokości, pompa jest wyłączana. Z kolei ruch w dół następuje po tym, gdy otwarty zostaje zawór, którym płyn hydrauliczny odpływa z przestrzeni roboczej siłownika.
Według danych Urzędu Dozoru Technicznego (UDT) w latach 2005-2011 ze wszystkich ponad 27 tys. nowych wind osobowych i osobowo- towarowych prawie 21 tys. było wyposażonych w napęd elektryczny. W dźwigach tego rodzaju na koła napędzane silnikiem elektrycznym nawinięte są liny, na których jednym końcu zawieszona jest kabina, a na drugim przeciwwaga. Ta ostatnia waży zwykle tylko tyle, ile kabina zapełniona do połowy. Windy elektryczne dzieli się na dwie grupy: dźwigi bezreduktorowe i z przekładnią.
NAPĘDY Z PRZEKŁADNIĄ KONTRA BEZPRZEKŁADNIOWE*
 Dźwigi z reduktorem sprawdzają się przede wszystkim w budynkach o średniej wysokości (do kilkunastu pięter) - tam, gdzie szybkość transportu nie jest priorytetem. Zakres prędkości ich ruchu wynosi bowiem najwyżej kilka m/s. Dzięki przekładni można użyć mniejszych i tańszych silników, które przy dużej prędkości zapewnią wymagany moment obrotowy. Niestety jest to uzyskiwane kosztem strat energii w reduktorze ponoszonych na ugniatanie smaru oraz ciepło wydzielające się w wyniku m.in. tarcia między zębami.
Dźwigi z reduktorem sprawdzają się przede wszystkim w budynkach o średniej wysokości (do kilkunastu pięter) - tam, gdzie szybkość transportu nie jest priorytetem. Zakres prędkości ich ruchu wynosi bowiem najwyżej kilka m/s. Dzięki przekładni można użyć mniejszych i tańszych silników, które przy dużej prędkości zapewnią wymagany moment obrotowy. Niestety jest to uzyskiwane kosztem strat energii w reduktorze ponoszonych na ugniatanie smaru oraz ciepło wydzielające się w wyniku m.in. tarcia między zębami.
Sprawność przekładni zależy od jej konstrukcji. Niska, typowo do 70%, charakteryzuje reduktory ślimakowe. Wpływa na nią m.in. kąt pochylenia linii zębów, współczynnik tarcia materiału, z jakiego je wykonano i parametry pracy.
Sprawność jest tym większa, im mniejsze jest przełożenie przekładni i im większa jest jej prędkość wejściowa. Reduktory tego typu są jednak popularne, bo pracują cicho i dobrze absorbują wstrząsy. Większą sprawność, nawet ponad 90%, mają przekładnie śrubowe. Niestety działają one głośniej i są droższe. Z kolei reduktory planetarne zajmują mniej miejsca niż te śrubowe.
W napędach bezprzekładniowych wyeliminowane są straty energii w reduktorze, wymagania odnośnie do wydajności ich chłodzenia są mniejsze, a ich konserwacja prostsza, bo nie trzeba smarować przekładni. Dźwigi tego typu są używane przede wszystkim w wysokich budynkach, gdyż zakres ich prędkości mieści się typowo w przedziale od kilku m/s do kilkunastu m/s.
NOWY TREND - WINDY BEZ MASZYNOWNI
Według UDT w 2005 roku ze wszystkich ponad 1600 nowych wind przeszło 850 sztuk nie miało oddzielnej maszynowni. Popularność takich konstrukcji nie maleje - sześć lat później było to już odpowiednio ponad 2800 z przeszło 5100 dźwigów.
W windach hydraulicznych bez maszynowni zespół napędowy ze zbiornikiem oleju umieszcza się w podszybiu, czyli pod poziomem najniższego przystanku, lub wbudowuje się go w ścianę szybu. W dźwigach elektrycznych początkowo planowano silnik z wciągarką montować w przeciwwadze.
Z pomysłu tego jednak szybko zrezygnowano z powodu trudności z dotarciem do niej w przypadku awarii, ostatecznie wybierając lokalizację u góry szybu. Do znajdującego się tam napędu można się dostać z dachu budynku lub, głównie w czasie prac serwisowych, z "tymczasowej" maszynowni na dachu kabiny zatrzymanej na niższym poziomie.
Dźwigi elektryczne tego typu najczęściej instaluje się w budynkach niskich lub średniej wysokości (od 2 do 30 pięter). Ich montaż, a później konserwacja oraz naprawy są trudniejsze niż "zwykłych" dźwigów hydraulicznych lub elektrycznych. Ponadto maszyny te pracują głośniej, ponieważ hałas emitowany przez zespół napędowy rozchodzi się szybem na wszystkie kondygnacje budynku.
Brak wydzielonej maszynowni to jednak spora oszczędność miejsca i, przede wszystkim, energii. Dźwigi elektryczne tego typu składają się bowiem z podzespołów mniejszych, kompaktowych i słabiej się nagrzewających. Przykładem są silniki synchroniczne z magnesami trwałymi (Permanent Magnet Synchronous Motors, PMSM).
|
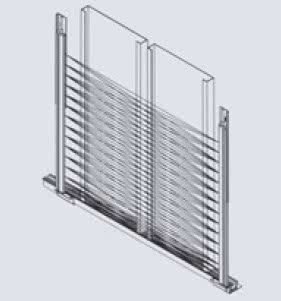
 Wciągarki bezreduktorowe serii Zetatop Wciągarki bezreduktorowe serii Zetatop
Wciągarki są napędzane silnikami synchronicznymi z magnesami trwałymi. Dostępne są w konstrukcji plecakowej w zawieszeniu 1:1, 2:1 lub wyższym. Mają certyfikowane hamulce. Średnica kół ciernych wynosi 160 mm w modelach SM160 (dla lin o średnicy od 4 mm), od 210 do 400 mm w modelach SM200C (dla lin 6 mm-10 mm) i od 240 mm do 600 mm w modelach SM200.40C (dla lin od 6 do 15 mm).
Model SM225 zapewnia udźwig do 2 ton (koła o średnicach od 320 do 600 mm). Model SM250.60B jest przystosowany do obciążeń do 1250 kg w zawieszeniu 1:1 lub 2500 kg w zawieszeniu 2:1, przy prędkości 3 m/s. Modele SM250.80C i SM250.100C mają natomiast udźwig 1600 kg w zawieszeniu 1:1 i pracują z prędkością 4 m/s.
www.ziehl-abegg.com
 Kurtyna świetlna Elite 616 Kurtyna świetlna Elite 616
Kurtyna zbudowana jest z układu 74 nadajników i odbiorników podczerwieni zamontowanych krzyżowo. Można je instalować w pozycji dynamicznej, czyli na drzwiach kabiny lub statycznej, tzn. w kabinie. Wykrywają obiekty do wysokości 1,65 m. Automatycznie regulowana jest skuteczność detekcji. Gdy drzwi są otwarte, działają wszystkie czujniki, natomiast jeżeli przerwa między skrzydłami drzwi jest mniejsza niż 600 mm, używanych jest tylko 46 czujników. Kiedy odstęp ten wynosi 300 mm, tylko 16 sensorów jest aktywnych. Zakres czujników wynosi 4 m.
www.elevator.pl
System pomiarowy do wind LM3
 Kompaktowy układ pomiarowy do odwzorowania pozycji wałka o wzmocnionej konstrukcji. Jest przystosowany do pomiarów w windach o maksymalnej wysokości 53 m i prędkości kabiny nieprzekraczającej 1,6 m/s. Kompaktowy układ pomiarowy do odwzorowania pozycji wałka o wzmocnionej konstrukcji. Jest przystosowany do pomiarów w windach o maksymalnej wysokości 53 m i prędkości kabiny nieprzekraczającej 1,6 m/s.
www.kuebler.com
|
BAZA KONSTRUKCYJNA WIND BEZ MASZYNOWNI
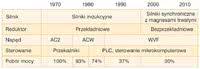
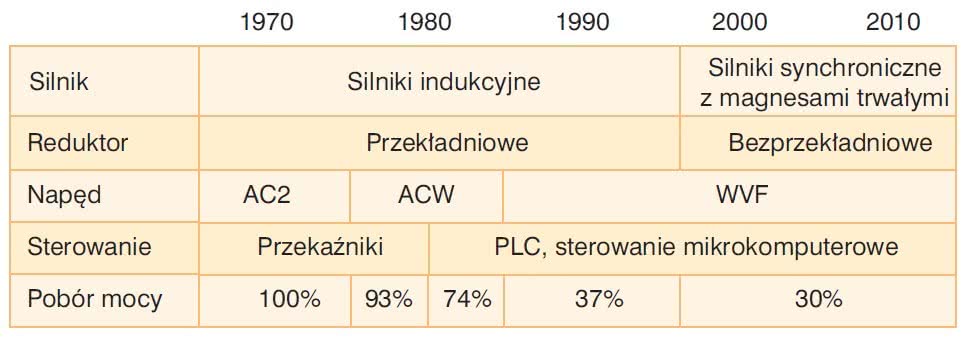
Rys. 1. Przełomowe momenty w rozwoju techniki dźwigowej (źródło: Mitsubishi Electric)
W wymienionych silnikach uzwojenia wirnika zastąpiono magnesami trwałymi. Dzięki wyeliminowaniu strat energii na ciepło wydzielające się w tych elementach, silniki synchroniczne charakteryzuje większa sprawność w porównaniu z tradycyjnymi. Zapewniają one również duży moment obrotowy także przy niskich prędkościach, dzięki czemu sprawdzają się w napędach bezprzekładniowych.
Używając magnesów ze stopów ziem rzadkich - na przykład samarowo-kobaltowych (SmCo) albo neodymowych (NdFeB), które cechuje większa niż magnesy ferrytowe gęstość energii pola magnetycznego, dodatkowo poprawić można współczynnik mocy do wagi silnika typu PMSM oraz stosunek momentu obrotowego do jego masy.
Ponadto w dźwigach bez maszynowni używane są liny aramidowe, które są kilkakrotnie lżejsze niż stalowe, a przy tym równie jak one wytrzymałe na rozrywanie. Dzięki temu, że cechuje je również większa wytrzymałość zmęczeniowa przy naprężeniach zginających, ich promień gięcia jest mniejszy. To z kolei pozwala na użycie kół o mniejszej średnicy, do napędzania których zastosować można silniki o mniejszym momencie obrotowym.
Liny tego typu nie wymagają też smarowania, co zmniejsza koszty oraz ułatwia konserwację. Zalety te cechują także pasy zbudowane z wielu bardzo cienkich stalowych prętów umieszczonych w osłonie wykonanej z tworzywa sztucznego, które są dodatkowo tańsze niż te aramidowe.
INNE SPOSOBY NA ENERGOOSZCZĘDNE WINDY
Kiedy winda elektryczna jedzie w dół, a masa jej obciążenia, czyli kabiny z ładunkiem, jest większa niż masa przeciwwagi, silnik hamuje. Podobnie jest wtedy, gdy pusta kabina przemieszcza się w górę. Aby energię, która w takich sytuacjach jest tracona na ciepło wydzielane do otoczenia, zwrócić do sieci, trzeba zastosować napęd regeneracyjny.
Chociaż windy zużywają przeciętnie od 5% do 10% energii elektrycznej zasilającej budynek i pokusa takiej inwestycji może być silna, nie zawsze jest ona opłacalna. Ze względu na straty energii, które występują w silniku, przekładni oraz są skutkiem oporu powietrza, koszty napędu z odzyskiem energii w budynkach niskich i o średniej wysokości, w których winda jest używana rzadko, raczej szybko się nie zwrócą.
Dźwigi hydrauliczne pobierają energię tylko wtedy, gdy kabina jedzie w górę. W drodze powrotnej ich ruch jest wynikiem oddziaływania siły grawitacji przy kontrolowanym przepływie oleju. Wykorzystuje się to do zwiększania ich sprawności przez regulację prędkości bez wpływu na całkowity czas podróży. Polega to na zmniejszeniu szybkości unoszenia kabiny i zwiększeniu prędkości jej opadania. Dzięki temu użyć można mniejszego silnika.
Lżejsze kabiny także przyczyniają się do ograniczenia poboru energii, dlatego ważne jest, z jakich materiałów są budowane. Dalsze oszczędności uzyskuje się, wyłączając oświetlenie kabiny, jej klimatyzację oraz podświetlenie panelu sterowniczego i inne odbiorniki w czasie, gdy winda nie jest używana. Dodatkowo jasność wyświetlacza panelu bywa regulowana w zależności od natężenia światła w otoczeniu. Warto również rozważyć zamontowanie energooszczędnych lamp LED.
BEZPIECZNA PODRÓŻ DZIĘKI CZUJNIKOM
 Dźwigi osobowe oraz osobowo-towarowe stanowią nagromadzenie czujników, dzięki którym ich pasażerowie i obsługa mogą uniknąć potencjalnie niebezpiecznych sytuacji. Podstawowe zabezpieczenie to kurtyny świetlne, które są montowane w drzwiach.
Dźwigi osobowe oraz osobowo-towarowe stanowią nagromadzenie czujników, dzięki którym ich pasażerowie i obsługa mogą uniknąć potencjalnie niebezpiecznych sytuacji. Podstawowe zabezpieczenie to kurtyny świetlne, które są montowane w drzwiach.
Osoby przechodzące przez te ostatnie przecinają wiązki promieniowania emitowanego przez źródło, co jest od razu wykrywane w sterowniku analizującym dane z odbiornika. W reakcji na obecność człowieka zamykające się drzwi są natychmiast szerzej otwierane.
Zapobiega to zatrzaśnięciu się między ich skrzydłami osób, które przez nieuwagę lub zbyt późno spróbują wejść do windy albo z niej wyjść. Kurtyny świetlne w porównaniu z pojedynczymi czujnikami mają kilka zalet - na przykład wykrywają obiekty o różnej szerokości i wysokości. Ponadto nawet częściowo uszkodzone mogą spełniać swoją funkcję.
Nad wejściem do windy montowane są również czujniki radarowe wykorzystujące efekt Dopplera polegający na zmianie częstotliwości sygnału odbitego od poruszającego się obiektu, na podstawie której można określić, czy zbliża się on, czy oddala od sensora. W oparciu o to, sterownik windy automatycznie otwiera drzwi kabiny, gdy w jej kierunku idą potencjalni pasażerowie i blokuje je, gdy na odpowiednim poziomie akurat wtedy nie ma kabiny.
Radar zapobiega też przedwczesnemu zamknięciu drzwi. To ułatwienie zwiększa równocześnie bezpieczeństwo osób niepełnosprawnych, zwłaszcza tych poruszających się na wózkach inwalidzkich. Sygnał z tego czujnika może ponadto uruchamiać systemy pomocnicze, na przykład oświetlenie i klimatyzację w kabinie. Podobną funkcję spełniają kamery instalowane nad drzwiami windy. Obrazy przez nie rejestrowane mogą być także wykorzystywane przez służby ochrony budynku.
OBCIĄŻENIE I POZIOM POD KONTROLĄ
W kabinie instalowane są czujniki obciążenia. W tych zbudowanych z zewnętrznej klatki, w której na amortyzatorach mocowana jest klatka wewnętrzna mieszcząca ludzi, sensory umieszcza się między tą ostatnią a tłumikami drgań. Pełnią one potrójną funkcję. Przede wszystkim zabezpieczają windę przed przeciążeniem.
Można także ustalić minimalną wagę, dopiero po przekroczeniu której dźwig zostanie uruchomiony - tak realizuje się zabezpieczenie przed samotnymi podróżami dzieci oraz zwierząt. Ponadto odczyty z czujnika obciążenia kabiny są przydatne w zarządzaniu ruchem wielu wind i w optymalizacji zużycia energii. Dodatkową ochronę przed przeciążeniem stanowią sensory naprężenia lin podtrzymujących kabinę i, w dźwigach hydraulicznych, te mierzące zmianę ciśnienia płynu hydraulicznego.
Kolejnym zabezpieczeniem są sensory optoelektroniczne lub czujniki Halla instalowane w szybie albo na dachu kabiny mierzące poziom, na jakim ta ostatnia aktualnie się znajduje. W ten sposób sprawdza się, czy winda nie przemieszcza się za szybko (wtedy automatycznie się ją hamuje), czy zatrzymała się i czy znajduje się na odpowiednim piętrze. W dźwigach elektrycznych położenie oraz prędkość kabiny równocześnie monitoruje się na podstawie wyników pomiarów z enkoderów mierzących szybkość i kierunek obrotów silnika.
SYTUACJE WYJĄTKOWE
Windy muszą być też zabezpieczone na wypadek różnych nieprzewidzianych sytuacji - na przykład braku zasilania, pożaru oraz trzęsienia ziemi. W dźwigach elektrycznych skutkiem tego ostatniego jest m.in. zmiana toru ruchu przeciwwagi, w efekcie której może ona zniszczyć swoje prowadnice lub zderzyć się z kabiną.
To przemieszczenie wykrywa się, wprowadzając wzdłuż prowadnic w głąb szybu stalowe liny, które przechodzą przez zaczepy zamocowane na przeciwwadze. Gdy w wyniku jej przesunięcia pręty stykają się z zaczepami, zostaje zamknięty obwód elektryczny. Wykrywa to sterownik windy, który automatycznie przekierowuje kabinę, aby uniknąć zderzenia. Do detekcji fali uderzeniowej będącej skutkiem trzęsienia ziemi używane są także czujniki przyspieszenia.
Procedura ewakuacyjna w takiej sytuacji jest podobna, jak w razie braku prądu lub pożaru - przede wszystkim pasażerom trzeba umożliwić jak najszybsze i bezpieczne opuszczenie kabiny. W tym celu winda powinna zatrzymać się na najbliższym piętrze. W razie braku prądu z sieci wymaganą do tego energię dźwig czerpie z systemu zasilania awaryjnego budynku albo z akumulatorów.
JAK STEROWAĆ RUCHEM?

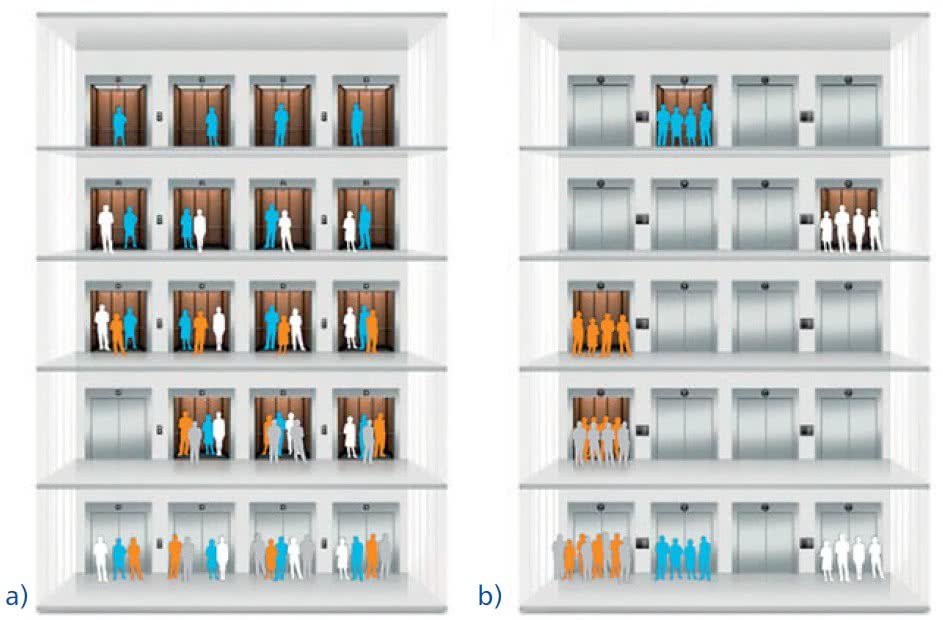
Rys. 2. Nowoczesne systemy sterowania windami (rys. b) zapewniają krótszą podróż, większy komfort i oszczędności energii (źródło: ThyssenKrupp)
W wysokich budynkach, a także w tych, w których spodziewane jest duże natężenie ruchu, w celu skrócenia czasu oczekiwania, jak i samej podróży, instaluje się kilka wind lub dźwigi zbudowane z wielu niezależnych kabin w jednym szybie.
Ich jazdę trzeba skoordynować w taki sposób, aby nie jeździły puste, ani przepełnione, pasażerowie nie czekali zbyt długo na windę, ani nie spędzali w niej za wiele czasu, równocześnie optymalizując zużycie energii przez unikanie zbyt częstego ich zatrzymywania. Z tych powodów algorytmy sterowania ruchem w rozbudowanych systemach transportowych uwzględniają wiele danych wejściowych - m.in. obciążenie poszczególnych kabin.
Dzięki temu można uniknąć na przykład sytuacji, w której spośród dwóch wind - pierwszej, zjeżdżającej z 20. piętra i drugiej - z 12., które wiozą odpowiednio - 1 oraz 10 osób, na wezwanie zjazdu w dół zgłoszone na piętrze 10. zatrzyma się winda druga. Nie byłoby to efektywne, bo mimo że ta kabina jest bliżej, jej zatrzymanie się opóźni podróż większej liczby osób.
Od kilku lat popularyzuje się także koncepcja smart elevator. Wdrożyło ją już wielu producentów wind - na przykład firmy Schindler, Otis oraz Th yssenKrupp. Zakłada ona, że do sterownika windy przekazać należy również dane o celu podróży, zanim jeszcze pasażer wsiądzie do windy. Nie chodzi jednak o wskazanie tylko jej kierunku przez wybór strzałki "w dół" lub "w górę", ale konkretnego poziomu. Realizuje się to, umieszczając na zewnątrz wind panel, na którego klawiaturze należy określić piętro docelowe. Informacją zwrotną dla pasażera jest numer windy, którą najszybciej dojedzie on na wybrany poziom.
Aby zapobiec fałszywym wskazaniom, nie pozostawia się możliwości skorygowania wyboru wewnątrz kabiny - jeżeli ktoś, na przykład dla żartu, poda niewłaściwe piętro, będzie musiał na nim wysiąść i ponownie wybrać właściwy poziom. W budynkach, w których na niektóre piętra wstęp mają tylko upoważnione osoby, wydawane są karty dostępu. Po odczytaniu z nich informacji identyfikujących daną osobę, na panelu wyświetlane są tylko te piętra, na których może ona przebywać.
Windy hydrauliczne a elektryczne
 Windy hydrauliczne opłaca się instalować tylko w budynkach o wysokości maksymalnie 7-8 pięter. W porównaniu z elektrycznymi zazwyczaj zużywają one bowiem więcej energii, są też wolniejsze - ich prędkość rzadko przekracza 1 m/s. Windy hydrauliczne opłaca się instalować tylko w budynkach o wysokości maksymalnie 7-8 pięter. W porównaniu z elektrycznymi zazwyczaj zużywają one bowiem więcej energii, są też wolniejsze - ich prędkość rzadko przekracza 1 m/s.
Ponadto lepkość oleju hydraulicznego zależy od jego temperatury, dlatego jeżeli jest zbyt zimny, na windę trzeba długo czekać, a gdy bardzo gorący - kabiną w czasie jazdy "szarpie". Zastosowany siłownik musi jednak mieć odpowiednio dużą średnicę, inaczej może ulec wyboczeniu.
Ważny jest też jego montaż - zazwyczaj instalowany jest głęboko w podstawie - tym głębiej, im większa jest wysokość podnoszenia, czyli długość odcinka przejazdu kabiny między najniższym a najwyższym przystankiem. Aby nie doszło do zanieczyszczenia wód gruntowych w przypadku montażu w ziemi, zagłębienie to powinno być możliwie jak najpłytsze, dlatego korzysta się z siłowników teleskopowych.
Zaletą wind hydraulicznych tego typu jest łatwość i szybkość instalacji. Ich zespół napędowy nie zajmuje wiele miejsca i można go umieścić w odległości od kilku do nawet kilkunastu metrów od szybu, na dowolnej kondygnacji, na przykład w piwnicy albo pod schodami. Dzięki swobodzie w lokalizacji maszynowni efektywniej wykorzystuje się dostępną przestrzeń i zmniejsza koszty budowy, mniej dokuczliwe są także odgłosy pracującego dźwigu.
Bez przeciwwagi szyb jest węższy, a obciążenie struktury budynku mniejsze. Ta ostatnia, oprócz tego, że utrzymuje odpowiednie naprężenie lin, na których zawieszona jest kabina wind elektrycznych, zapewnia stałą energię potencjalną w systemie. Pozytywnie wpływa to na sprawność energetyczną dźwigów tego typu. Ich maszynownia powinna się jednak znajdować nad szybem, na przykład na piętrze nieużytkowym. To z kolei zwiększa koszty budowy i komplikuje projekt obiektu.
|
EFEKTYWNOŚĆ SMART ELEVATOR
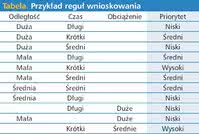
Tabela. Przykład reguł wnioskowania
Omawiana koncepcja wymaga dodatkowego wyjaśnienia. Pasażerów, którzy chcą dojechać na te same lub sąsiadujące ze sobą piętra, kieruje się do tych samych wind. Takie grupowanie pozwala znacznie zmniejszyć liczbę zatrzymań poszczególnych kabin, co wyjaśniamy na przykładzie.
Załóżmy, że na parterze budynku czeka szesnaście osób, których cele podróży rozkładają się w sposób przedstawiony na rysunku 2, tzn.: "szarzy" S - 1 piętro, "pomarańczowi" P - 2, "biali" B - 3,, "niebiescy" N - 4. Jeżeli rozejdą się one do czterech wind, wybierając je przypadkowo, w taki sposób, że zapełnienie poszczególnych kabin będzie następujące: 1 - BNP, 2 - PSNB, 3 - SPNBS i 4 - BNPS nim wszyscy dotrą do celu windy, w sumie zatrzymają się aż 15 razy (rys. 2a). Kierując pasażerów P i S do windy 1, N do 2, a B do 4, uruchomić trzeba będzie natomiast tylko trzy windy, a te zatrzymają się łącznie tylko 4 razy (rys. 2b).
W sterowaniu smart elevator wykorzystywane są również informacje o tym, jak liczba zgłoszeń rozkłada się w ciągu całego dnia. Pod uwagę brane są komunikacyjne szczyty występujące z rana, gdy ludzie przychodzą do biura albo wychodzą z domu, po południu, kiedy wychodzą z pracy lub wracają do mieszkań, jak i w innych godzinach, w zależności od specyfiki budynku - na przykład w porze obiadowej. W odpowiednich godzinach można zatem zwiększyć częstotliwość przejazdów kabin, zapobiegając gromadzeniu się ludzi na parterze i na wybranych piętrach. Regulując prędkość, skraca się natomiast czas podróży.
Wieloma windami można sterować sprawniej także wtedy, gdy budynek jest podzielony na strefy w zależności od natężenia ruchu. Tłokowi zapobiega przyznanie wyższego priorytetu przystankom na piętrach, na których mieszczą się często odwiedzane placówki.
Modernizacje kształtują rynek wind
 Biorąc pod uwagę obecną sytuację demograficzną, w tym starzenie się społeczeństw oraz postępująca urbanizację, można prognozować dosyć stały wzrost popytu na windy. Ważnym czynnikiem prorozwojowym jest także konieczność ich modernizacji. Biorąc pod uwagę obecną sytuację demograficzną, w tym starzenie się społeczeństw oraz postępująca urbanizację, można prognozować dosyć stały wzrost popytu na windy. Ważnym czynnikiem prorozwojowym jest także konieczność ich modernizacji.
Typowy czas życia windy (przy regularnym serwisowaniu) to około 20-30 lat, po czym wymaga ona odpowiedniej modernizacji. W Polsce, gdzie większość dźwigów w wielorodzinnych budynkach mieszkalnych zainstalowano w latach 80. ubiegłego wieku, "termin ważności" właśnie mija lub wkrótce upłynie.
Dzięki temu, jak wynika ze statystyk Urzędu Dozoru Technicznego, rocznie w naszym kraju modernizowanych jest ponad 1300 dźwigów osobowych i osobowo-towarowych. W latach 2004 - 2011 łącznie unowocześniono ich przeszło 11 tysięcy.
W zależności od stanu technicznego i celów modernizacji (m.in. ograniczenia poboru energii, zwiększenia przepustowości, poprawy bezpieczeństwa) polega to tylko na wstawieniu nowych: drzwi kabiny, napędu albo układu sterowania. W razie całościowej wymiany ze starego dźwigu pozostaje nierzadko tylko szyb.
|
LOGIKA ROZMYTA W STEROWANIU WINDAMI
 Ze względu na dużą ilość danych wejściowych oraz różnorodność, a często również rozbieżność celów sterowania (na przykład szybkość transportu bywa uzyskiwana kosztem efektywności energetycznej lub na odwrót) w zarządzaniu ruchem wind implementuje się złożone algorytmy sterowania. Takie są m.in. genetyczne oraz oparte na logice rozmytej (fuzzy logic).
Ze względu na dużą ilość danych wejściowych oraz różnorodność, a często również rozbieżność celów sterowania (na przykład szybkość transportu bywa uzyskiwana kosztem efektywności energetycznej lub na odwrót) w zarządzaniu ruchem wind implementuje się złożone algorytmy sterowania. Takie są m.in. genetyczne oraz oparte na logice rozmytej (fuzzy logic).
Ta ostatnia wykorzystuje zbiory rozmyte, między którymi nie ma dokładnie określonych granic, natomiast o tym, do którego z nich należy dana wartość, decyduje jej stopień przynależności, który mieści się w przedziale od 0 do 1. Oznacza to, że do niektórych zbiorów wartość może zaliczać się "trochę bardziej" albo "nieco mniej" niż do innych - inaczej niż wtedy, gdy jest to opisywane przy użyciu logiki binarnej. Ta rozróżnia bowiem tylko dwie możliwości: gdy wartość należy do zbioru - prawda, a gdy nie należy - fałsz. Stopień przynależności określany jest na podstawie funkcji przynależności (Membership Function) dla danej zmiennej w procesie fuzyfikacji (rozmycia).
Załóżmy, że w systemie sterowania wieloma windami opartym na logice rozmytej przyjęto cztery zmienne: trzy wejściowe i jedną wyjściową. Te pierwsze to:
- odległość (distance, D) określana jako liczba pięter, jaka dzieli poziom, na którym aktualnie znajduje się winda i ten, na którym oczekuje osoba ją wzywająca,
- obciążenie (loading, L), tzn. liczba "zajętych miejsc" w kabinie w momencie jej przyjazdu na piętro, z którego przyszło wezwanie,
- czas oczekiwania (time, T), czyli szacowany czas, przez który osoba wzywająca windę będzie musiała czekać na jej przyjazd.
Ta ostatnia zmienna powinna uwzględniać liczbę zatrzymań kabiny, które będą miały miejsce, nim dotrze ona na poziom zgłoszenia. Oznacza to, że należy oszacować, ile łącznie potrwa zamykanie i otwieranie drzwi na każdym przystanku oraz czas, w jakim poruszając się z określoną prędkością, kabina pokona dystans dzielący sąsiednie piętra. Zmienną wyjściową jest natomiast priorytet (priority, P). Winda, która będzie miała najwyższy, obsłuży dane wezwanie.
Aby wyznaczyć priorytet, najpierw (w procesie wnioskowania) skorzystać trzeba z zestawu reguł, zwykle w formie instrukcji warunkowych. Są to zasady, dla których w oparciu o wiedzę ekspercką przyjmuje się założenie, że ich zastosowanie pozwoli zrealizować dany cel sterowania. Baza reguł dla tych zmiennych mogłaby obejmować przykładowo instrukcje warunkowe takie jak te przedstawione w tabeli. Na podstawie wyników tych instrukcji wartość priorytetu dla każdej z wind jest wyznaczana w procesie defuzyfikacji (ostrzenia) - na przykład przy użyciu metody średniej ważonej.
Monika Jaworowska
W artykule wykorzystano informacje przedstawione w dokumencie opracowanym w ramach projektu E4 Energy Efficient Elevators and Escalators przy wsparciu Komisji Europejskiej.