
Ale potencjał Ethernetu przemysłowego, dostępność infrastruktury oraz taniego sprzętu sieciowego, duża szybkość transmisji, a także łatwość zintegrowania z innymi systemami sprawiają, że w nowo budowanych instalacjach korzysta się z niego chętniej niż z sieci fieldbus. Dlatego sieci polowe z sieciami Ethernetu przemysłowego współistnieją i prawdopodobnie jeszcze przez wiele lat się to nie zmieni. Protokoły komunikacyjne w automatyce to szerokie zagadnienie. W niniejszym artykule przedstawiamy wybrane aspekty popularnych protokołów Ethernetu przemysłowego i zaliczanych do kategorii fieldbus, a następnie sieci ze sobą porównujemy.
Jednym z popularniejszych protokołów sieciowych jest Profibus (Process Field Bus), który został opracowany w Niemczech w 1989 roku. Na rynek wprowadziła go firma Siemens, zaś protokół został zestandaryzowany i opisany w normie DIN 19245 w 1991 roku. Podobnie jak i inne przemysłowe protokoły komunikacyjne, Profibus jest zgodny z dwoma normami: IEC 61158 oraz IEC 61784. W pierwszej z nich zebrano wytyczne w zakresie cyfrowej komunikacji danych w sieciach polowych, pomiarowych i sterujących w przemysłowych systemach sterujących, natomiast w drugiej opisano profile dla protokołów komunikacyjnych opartych na normie IEC 61158.
PROFIBUS DP
 W standardzie Profibus wyróżnionych zostało kilka profili, w tym: Profibus DP (Decentralized Peripheral) i Profibus PA (Process Automation). Pierwszy znajduje zastosowanie w komunikacji między sterownikami PLC i urządzeniami peryferyjnymi, natomiast drugi zaprojektowano z myślą o sieciach w strefach zagrożonych wybuchem.
W standardzie Profibus wyróżnionych zostało kilka profili, w tym: Profibus DP (Decentralized Peripheral) i Profibus PA (Process Automation). Pierwszy znajduje zastosowanie w komunikacji między sterownikami PLC i urządzeniami peryferyjnymi, natomiast drugi zaprojektowano z myślą o sieciach w strefach zagrożonych wybuchem.
Wyróżnia się trzy wersje protokołu Profibus DP: DP-V0, służącą do cyklicznej wymiany danych procesowych oraz diagnostyki sieci, DP-V1 - do komunikacji acyklicznej z rozszerzeniami do na przykład przesyłania alarmów oraz DP-V2, m.in. do izochronicznej wymiany danych procesowych. W warstwie fizycznej wykorzystywany jest interfejs RS-485 lub światłowód. Osiągalne są prędkości transmisji: 9,6; 19,2; 45,45; 93,75; 187,5 kbit/s oraz 0,5; 1,5; 3; 6 i 12 Mb/s. Prędkość transmisji jest jednakowa dla wszystkich urządzeń w sieci i narzuca ją stacja aktywna (master). Maksymalna liczba urządzeń w segmencie sieci, z interfejsem RS485, wynosi 32.
W sieciach Profibus DP wykorzystywana jest technika przekazywania prawa dostępu do sieci między stacjami nadrzędnymi typu master. W ten sposób powstaje logiczna topologia pierścienia. Stacje podrzędne slave nie mają możliwości aktywnego dostępu do medium, tzn. nie mogą wysyłać zapytań, a jedynie odpowiadać na żądania stacji master.
ETHERNET/IP
Protokół EtherNet/IP (Ethernet Industrial Protocol, EIP) został opracowany w 2000 roku przez firmę Rockwell Automation, obecnie zaś jego rozwojem zajmuje się m.in. organizacja ODVA (Open DeviceNet Vendors Association). Opiera się on na protokole CIP (Common Industrial Protocol), który definiuje profile różnych urządzeń przemysłowych. Charakteryzują one ich właściwości i metody komunikowania się.
W EtherNet/IP wyróżniono dwa rodzaje wiadomości. Do pierwszej kategorii zaliczane są dane o znaczeniu niekrytycznym, na przykład diagnostyczne lub konfiguracyjne (Explicit Messages). Do ich transmisji wykorzystywany jest protokół TCP. Dane, które muszą być transmitowane w czasie rzeczywistym (Implicit Messages), są natomiast przesyłane za pośrednictwem protokołu UDP.
Priorytetyzacja Quality of Service gwarantuje, że pakiety drugiego typu będą miały wyższy priorytet. Ethernet/IP korzysta również z protokołu CIPsync, który zapewnia synchronizację zegarów czasu rzeczywistego w rozproszonych systemach. Taka możliwość jest wymagana w systemach, które koordynują działanie kilku podsystemów. Przykładem są wieloosiowe systemy sterowania ruchem.
CIPSync bazuje na protokole PTP (Precision Time Protocol) opisanym w normie IEEE 1588. PTP jest protokołem typu master-slave. Tym pierwszym jest najdokładniejszy zegar w sieci, z którym synchronizowane są pozostałe zegary typu slave. Proces synchronizacji jest podzielony na dwa etapy. W pierwszym - korekcji offsetu - wyrównuje się różnicę pomiędzy czasem zegara master i pozostałymi. W tym celu master wysyła do wszystkich zegarów slave wiadomość synchronizującą, która zawiera swój przewidywany czas wysłania. Równocześnie czas ten jest mierzony, zaś wynik pomiaru jest przesyłany w kolejnej wiadomości.
W węzłach slave czas odbioru obu tych wiadomości jest precyzyjnie mierzony. Różnica między tą wartością a danymi z wiadomości od mastera służy do korekcji czasu w poszczególnych zegarach slave. Jeżeli nie występują opóźnienia na linii transmisyjnej, zegary mastera oraz pozostałe są zsynchronizowane. To ewentualne opóźnienie jest wyznaczane w drugiej fazie synchronizacji poprzez pomiar czasu propagacji pakietu. Wartość ta jest w zegarach podrzędnych używana do ustawienia dokładnego czasu.
PROFINET
Profinet został opracowany przez firmę Siemens wspólnie z organizacją PNO (Profibus User Organization). Występuje w kilku wersjach przeznaczonych do realizacji zadań, które różnią się wymaganiami czasowymi transmisji. Ponadto każda z odmian Profinetu jest zaliczana do innej kategorii w zależności od tego, w jakim stopniu jest zgodna ze standardem Ethernet TCP/IP.
Wersja podstawowa powinna być używana do przesyłu danych, które są czasowo niekrytyczne, na przykład parametrów konfiguracyjnych i do wymiany informacji między systemami automatyki a tymi wyższego poziomu, na przykład MES czy ERP. W tym celu wykorzystuje się kanał TCP/UDP i IP i nie są wymagane żadne modyfikacje sprzętowe.
Do przesyłu danych krytycznych czasowo trzeba używać Profinetu w wersji real time. Nie wymaga ona korzystania z dodatkowych rozwiązań sprzętowych, lecz wprowadza zmiany w standardowej ramce ethernetowej. W tym wypadku dane o największym znaczeniu są przesyłane w pierwszej kolejności (priorytetyzacja VLAN), zaś dane konfiguracyjne i diagnostyczne za pośrednictwem UDP/IP.
W aplikacjach, które wymagają synchronizacji czasowej, na przykład w sterowaniu numerycznym, używany jest Profinet w trybie transmisji izochronicznej (Isochronous Real Time). Wykorzystuje się w nim oddzielne kanały do komunikacji real time oraz standardowej TCP/UDP, natomiast synchronizację uzyskuje, stosując specjalne switche wyposażone w układy ASIC.
Co wyróżnia sieci przemysłowe?
Architektura sieci Pierwszą kwestią, którą należy rozważyć, jest architektura sieci. Sieci tradycyjne składają się zwykle z odgałęzień sieci LAN oraz WAN. W przypadku sieci przemysłowych nawet te najmniejsze są z reguły strukturami wielopoziomowymi. W obrębie ich poszczególnych warstw komunikują się na przykład urządzenia polowe ze sterownikami, sterowniki pomiędzy sobą oraz z HMI, natomiast te ostatnie z systemami nadrzędnymi. Na różnych poziomach korzysta się często z innych mediów fizycznych i/lub protokołów. Chociaż dąży się do spłaszczenia takich struktur przeważnie jednak nie na tyle, na ile byłoby to możliwe, ponieważ pozwala to zachować funkcjonalną hierarchię. Niezawodność Od sieci przemysłowych oczekuje się większej niezawodności niż od sieci domowych lub biurowych. Nikomu nie trzeba tłumaczyć tego, jak groźne skutki może mieć awaria sieci w systemie automatyki, począwszy od uszkodzenia sprzętu, przez straty materiałów, włącznie z zagrożeniem dla zdrowia i życia pracowników, a nawet skażeniem środowiska. Determinizm czasowy Kolejnym wymogiem jest determinizm czasowy transmisji. W sieciach, w których jest gwarantowany, okres od wysłania pakietu danych od nadawcy do jego dotarcia do odbiorcy jest z góry określony i pozostaje niezmienny. Wówczas komunikacja między węzłami sieci może być realizowana w czasie rzeczywistym, łatwiejsza jest też ich synchronizacja. Obie te kwestie są kluczowe dla sprawnego działania systemów sterowania. Ilość danych Następna różnica dotyczy rozmiaru przesyłanych danych. W sieciach przemysłowych transmitowane są z reguły małe pakiety danych, często o rozmiarze kilku bajtów. W sieciach domowych i biurowych, zwłaszcza podłączonych do Internetu, przesyłane są nieporównywalnie większe ilości danych. Dysproporcja ta jednak z pewnością będzie stopniowo maleć wraz z rozwojem Przemysłowego Internetu Rzeczy i innych rozwiązań, które zalicza się do Przemysłu 4.0. |
 Od sieci przemysłowych oczekuje się więcej niż od domowych albo biurowych. Chociaż wiele zależy od specyfiki zadania, w którym zostanie wdrożona sieć komunikacyjna, można wyróżnić kilka wspólnych wymagań oraz wskazać kilka różnic w porównaniu ze "zwykłymi" sieciami.
Od sieci przemysłowych oczekuje się więcej niż od domowych albo biurowych. Chociaż wiele zależy od specyfiki zadania, w którym zostanie wdrożona sieć komunikacyjna, można wyróżnić kilka wspólnych wymagań oraz wskazać kilka różnic w porównaniu ze "zwykłymi" sieciami.ETHERCAT
EtherCAT (Ethernet for Control Automation Technology) został opracowany przez firmę Beckhoff Automation, natomiast obecnie w jego rozwój i popularyzację jest także zaangażowana organizacja ETG (EtherCAT Technology Group). Komunikacja w sieci zorganizowana jest według modelu master-slave z dodatkowym mechanizmem przetwarzania ramki w locie.
Polega on na tym, że węzeł nadrzędny wysyła jedną ramkę ethernetową, w której umieszczane są wiadomości przeznaczone dla wszystkich węzłów podrzędnych, a nie tylko dla jednego odbiorcy. Ramka dociera po kolei do wszystkich stacji w sieci. Każda z nich najpierw sprawdza, czy w ramce znajdują się dane, których jest odbiorcą. Jeżeli tak, to odczytuje odpowiedni fragment, a następnie dodaje swoją odpowiedź - na przykład potwierdzającą odbiór wiadomości. Ramka jest wówczas przesyłana dalej, a kiedy dotrze do ostatniego węzła, zostaje zawrócona.
Sieci EtherCAT pracują zatem w logicznej topologii pierścienia. Dzięki temu, że w ramce przenoszone są dane do i od wielu węzłów sieci jednocześnie, zostaje rozwiązany problem nieprzystosowania Ethernetu do transmisji małych pakietów danych. W standardowej ramce ethernetowej dane kontrolne mogą bowiem zajmować więcej miejsca niż zasadnicza informacja.
Najkrótsza ramka ethernetowa ma rozmiar 84 bajtów. Jeżeli przykładowo urządzenie okresowo przesyła 4 bajty danych, to wykorzystuje ją w niespełna 5%, podczas gdy w EtherCAT nawet w ponad 90%. W sieciach przemysłowych ma to ogromne znaczenie, gdyż za ich pośrednictwem najczęściej przesyłane są właśnie małe ilości informacji - na przykład wyniki pomiarów albo instrukcje sterujące.
Mobilność sprzyja sieciom bezprzewodowym
Jednym z czynników, który napędza segment sieci bezprzewodowych, jest popularyzowanie się w przemyśle urządzeń przenośnych. Pełnią one funkcję przede wszystkim przenośnym paneli operatorskich. Takie rozwiązanie ma wiele zalet. Korzystając z nich, operator ma dostęp do systemu bez względu na to, gdzie się znajduje i może zdalnie nadzorować pracę instalacji. Jest to szczególnie korzystne w przypadku pracy w strefie zagrożonej wybuchem, tam gdzie panują ekstremalne temperatury albo istnieją wymogi co do sterylności. Oprócz tego dodatkowe wyposażenie smartfonów i tabletów - jak kamera i nawigacja GPS - można wykorzystać do tworzenia dokumentacji technicznej i lokalizowania operatora w celu udostępnienia mu tylko tych informacji, których w danej chwili potrzebuje. |
 Z analizy firmy HMS Industrial Networks wynika, że roczny wzrost segmentu sieci bezprzewodowych wyniósł w 2017 roku 32% (rok wcześniej 30%), natomiast udział w całym rynku sieci przemysłowych zwiększył się z roku na rok z 4% do 6%. Dominujące technologie to: WLAN (4%) i Bluetooth.
Z analizy firmy HMS Industrial Networks wynika, że roczny wzrost segmentu sieci bezprzewodowych wyniósł w 2017 roku 32% (rok wcześniej 30%), natomiast udział w całym rynku sieci przemysłowych zwiększył się z roku na rok z 4% do 6%. Dominujące technologie to: WLAN (4%) i Bluetooth.MODBUS
Protokół Modbus został opracowany przez firmę Modicon w 1979 roku, jest to zatem jeden z najdłużej użytkowanych protokołów komunikacji przemysłowej. Obecnie za jego promocję i rozwój odpowiada Modbus Organization.
Bazuje on na modelu komunikacji master-slave. Węzeł nadrzędny, aby połączyć się z węzłem podrzędnym wysyła komunikat składający się z: adresu odbiorcy, treści wiadomości oraz sumy kontrolnej, której sprawdzenie pozwala wykryć ewentualne błędy transmisji. Komunikat jest widoczny dla wszystkich węzłów sieci, jednak odbiera go, interpretuje i odpowiada na niego wyłącznie węzeł o wskazanym adresie sieciowym. Węzły slave nie mogą inicjować transmisji, jedynie odpowiadają na zapytania węzłów master.
Wyróżnia się trzy typy protokołu Modbus: ASCII, RTU oraz TCP. Nie różnią się one formatem wiadomości, lecz jedynie sposobem ich kodowania na potrzeby transmisji. W Modbus-ASCII wykorzystywany jest zapis szesnastkowy, przez co komunikacja w tym trybie jest najmniej efektywna ze wszystkich wymienionych. W Modbus-RTU dane komunikatu są zapisywane w kodzie binarnym, zaś w trzeciej wersji protokołu do przesyłu wiadomości w formacie Modbus wykorzystuje się protokół TCP/IP i sieć Ethernet.
Gorący temat: Czym są sieci TSN?Od pewnego czasu tematem cieszącym się dużym zainteresowaniem są sieci TSN (Time Sensitive Networks). Nie powinno to dziwić szczególnie w związku z przewidywanym rozwojem Przemysłu 4.0, bowiem sieci TSN mają umożliwić połączenie wszystkich systemów w zakładzie, od tych na poziomie sterowania po informatyczne na poziomie zarządzania pracą całego przedsiębiorstwa, w ramach ujednoliconej sieci, z możliwością realizacji transmisji w precyzyjnie ustalonych ramach czasowych. Na wstępie warto wyjaśnić, że TSN prawdopodobnie nie zostaną zdefiniowane jako jeden standard, a raczej będzie to rodzina specyfikacji, z których każda będzie się odnosiła do innego aspektu albo wymogu deterministycznej i niezawodnej transmisji. Prace nad niektórymi z nich trwają dłużej niż nad innymi, więc są w różnym stopniu zaawansowania - część została upubliczniona, niektóre są na ukończeniu, a nad pozostałymi prace dopiero rozpoczęto. Przegląd standardów sieci TSN Jeżeli chodzi o te już opublikowane, to w tej grupie znajdują się specyfikacje, które charakteryzują podstawowe aspekty działania sieci TSN. Jest to m.in. synchronizacja urządzeń w sieci w oparciu o wspólną podstawę czasu według IEEE 802.1AS-2011 albo IEEE 1588. Drugim jest ograniczenie opóźnień oraz jitteru sygnałów. Uzyskuje się je różnymi metodami, które zostały opisane w następujących normach: IEEE 802.1Qbv-2015 (technika scheduled traffic), IEEE 802.1Qbu-2016 i IEEE 802.3br-2016 (metoda frame preemption) oraz IEEE 802.1Qav-2009. Nad innymi sposobami zarządzania ruchem sieciowym w sieciach TSN wciąż trwają prace. Techniki, które mają poprawić ich niezawodność, opisano natomiast w IEEE 802.1Qci-2017 (Per-Stream Filtering and Policing) oraz IEEE 802.1CB (Frame Replication and Elimination for Reliability). Zarządzanie ruchem Ważnym dokumentem, który nie jest jeszcze gotowy, jest IEEE P802.1Qcc. Opisano w nim różne schematy zarządzania siecią, w tym: w pełni scentralizowany, zdecentralizowany oraz częściowo scentralizowany. Ten pierwszy zakłada istnienie głównego menedżera sieci. Będzie on znał właściwości urządzeń w sieci, zależności pomiędzy nimi oraz wymogi odnośnie do przebiegu transmisji. Uwzględniając to i dodatkowo specyfikę aplikacji, będzie zarządzał ruchem sieciowym w taki sposób, aby segmenty sieci oparte na różnych protokołach komunikacyjnych, wymagające albo nie transmisji w czasie rzeczywistym, jak najefektywniej w stosunku do swoich potrzeb wykorzystywały jej zasoby. Podsumowanie Pierwsze próby stworzenia sieci TSN były podejmowane w latach 80. zeszłego wieku, jednak bez powodzenia, na co złożył się szereg czynników, w tym przede wszystkim brak w tamtym czasie możliwości technicznych zorganizowania komunikacji na takim poziomie skomplikowania. Dzięki nim jednak przez lata udało się doprecyzować wymogi stawiane sieciom TSN, zaś obecny poziom techniki stopniowo pozwala je realizować. Choć są one wciąż w powijakach, wymienione wcześniej ukończone specyfikacje dają już solidne podstawy do podejmowania prób ich wdrażania. Idealnie byłoby, gdyby przyjęły się w jakimś zastosowaniu na masową skalę, na przykład w samochodach, przyspieszyłoby to bowiem z pewnością ich rozwój i zmniejszyło koszty ich implementacji. |
CC-LINK
 CC-Link został opracowany ponad dwadzieścia lat temu przez firmę Mitsubishi Electric. W sieci tego typu też wyróżnia się węzły typu master oraz slave. Te pierwsze wysyłają komunikaty do wszystkich stacji podporządkowanych jednocześnie, a potem odpytują je osobno (broadcast polling). Prędkość transmisji, w zależności od długości segmentu sieci, wynosi od 156 kb/s (maksymalnie 1,2 km) do 10 Mb/s (najwyżej 100 m). Wykorzystując wzmacniacze sygnału, największą szybkość przesyłu danych można uzyskać na odległości ponad 4 km.
CC-Link został opracowany ponad dwadzieścia lat temu przez firmę Mitsubishi Electric. W sieci tego typu też wyróżnia się węzły typu master oraz slave. Te pierwsze wysyłają komunikaty do wszystkich stacji podporządkowanych jednocześnie, a potem odpytują je osobno (broadcast polling). Prędkość transmisji, w zależności od długości segmentu sieci, wynosi od 156 kb/s (maksymalnie 1,2 km) do 10 Mb/s (najwyżej 100 m). Wykorzystując wzmacniacze sygnału, największą szybkość przesyłu danych można uzyskać na odległości ponad 4 km.
Protokół CC-Link poza "zwykłą" wersją jest dostępny w wersjach: LT, Safety oraz IE. W pierwszej maksymalnie uproszczono najważniejsze aspekty działania sieci, dlatego CC-Link/LT uznaje się za odpowiednik standardu AS-i. CC-Link Safety zapewnia niezawodność transmisji odpowiednią dla aplikacji bezpieczeństwa zgodnych z IEC 61508 SIL3 i EN 954-1/ISO 13849-1 kategoria 4. W sieciach CC-Link IE (Industrial Ethernet) można natomiast uzyskać prędkość przesyłu danych rzędu gigabitów na sekundę przy maksymalnej odległości pomiędzy stacjami powyżej 500 m.
CAN/CANOPEN, DEVICENET
Specyfikacja CAN (Control Area Network) została opracowana w latach 80. zeszłego wieku przez firmę Bosch na potrzeby branży samochodowej. W związku z tym, że w oparciu na sieciach tego typu zamierzano zorganizować systemy sterowania w samochodach, musiały one spełniać określone wymagania. Najważniejsze z nich to: duża szybkość transmisji danych, odporność na zakłócenia i elastyczność w zakresie liczby węzłów sieci. Sprawiło to, że magistralą CAN zainteresował się przemysł. Wkrótce też powstała organizacja CAN in Automation, która do dzisiaj zajmuje się rozwojem oraz promocją sieci tego typu.
Według modelu OSI standard CAN wykorzystuje warstwę fizyczną oraz warstwę łącza danych. Zostały one scharakteryzowane w zbiorze norm IEC 11898. Jeżeli natomiast chodzi o warstwę aplikacji, to opracowano wiele protokołów bazujących na standardzie CAN. Przykładami są: CANopen i DeviceNet. Oba protokoły zostały opracowane w latach 90. zeszłego wieku, pierwszy przez organizację CAN in Automation, natomiast drugi przez firmę Allen-Bradley.
Jeśli chodzi o CANopen, to zdefiniowano w nim szereg profili dla konkretnych urządzeń oraz aplikacji, na przykład zespołów maszyn o określonej funkcjonalności. Ułatwiają one projektowanie, a następnie integrację urządzeń w sieci w myśl zasady plug and play. DeviceNet, którego promocją oraz rozwojem zajmuje się organizacja ODVA (Open DeviceNet Vendors Association), opiera się z kolei na protokole CIP (Common Industrial Protocol).
Wojciech PopekB&R Automatyka Przemysłowa
Z naszego punktu widzenia jako dostawcy kompletnych systemów sterowania, Ethernet POWERLINK jest pierwszym wyborem przy realizacji połączeń pomiędzy urządzeniami. Jest to deterministyczna sieć przemysłowa oparta o otwarty protokół openPOWERLINK. Takie rozwiązanie zalecamy do wszystkich nowo budowanych systemów, gdyż umożliwia najlepsze wykorzystanie właściwości urządzeń i pozwala na realizację dowolnej topologii sieci. W przypadku wyboru sieci do systemu sterowania istotną kwestią jest możliwość sprawnej diagnostyki ewentualnej awarii. Jeżeli system sterowania jest oparty na wielu typach sieci to jego diagnostyka wymaga większych nakładów, dlatego dobrą tendencją jest stosowanie jednej sieci w ramach całego systemu. Wybierając wcześniej wymieniony protokół, w ramach jednej fizycznej sieci możemy zrealizować zadania związane ze sterowaniem, obsługą protokołu systemu bezpieczeństwa oraz równolegle w asynchronicznej części protokołu przesyłać dane niezwiązane ze sterowaniem - np. obrazy wideo.
Jeśli chodzi o przyszłość technologii sieciowych, to warto zwrócić uwagę na standard OPC UA TSN. Jest to rozszerzenie protokołu OPC UA dla systemów wymagających determinizmu czasowego podczas przesyłania danych, czyli np. w sieciach przemysłowych. Standard ten ma sprostać wymaganiom stawianym przez Industrial IoT, takim jak Big Data, bezpieczeństwo, przesyłanie informacji w czasie rzeczywistym, integracja z systemami nadrzędnymi (ERP, SCADA), otwarte standardy, łatwość konfiguracji i diagnostyki. B&R jako członek OPC Foundation pracuje aktualnie nad OPC UA TSN dla systemów we/wy, co pozwoli spełnić wymagania, jakie będą stawiane w przyszłości przed systemami automatyki. |
ETHERNET POWERLINK
POWERLINK został opracowany w 2001 roku przez firmę B&R, a obecnie jego rozwojem zajmuje się organizacja Ethernet POWERLINK Standardization Group (EPSG). W zakresie kontroli dostępu do łącza jest w nim wykorzystywany mechanizm szczelin czasowych (timeslots), które są przyporządkowywane poszczególnym stacjom oraz procedura odpytywania (polling).
W sieci funkcję nadrzędną pełni węzeł typu MN (Managing Node), który koordynuje transmisję danych. Przydziela on uprawnienia do nadawania węzłom podrzędnym typu CN (Controlled Node) i synchronizuje je. W każdym cyklu transmisji wyróżnić można trzy przedziały. W pierwszym MN wysyła do wszystkich CN ramkę SoC (Start of Cycle), która synchronizuje te węzły.
Następnie zachodzi wymiana danych izochronicznych. MN wysyła kolejno w stałym porządku do poszczególnych CN zapytanie (Poll Request). Każdy z węzłów podrzędnych natychmiast na nie odpowiada, dzięki czemu unika się kolizji. Ramka odpowiedzi (Poll Response) jest dostępna również dla pozostałych CN (broadcast).
W trzeciej fazie cyklu przesyłane są dane asynchroniczne. Mogą to być duże pakiety danych o niekrytycznym znaczeniu, które są dzielone na części i transmitowane oddzielnie, w kilku cyklach. W ten sposób przesyła się na przykład dane konfiguracyjne albo ramki TCP/IP.
Aby dany węzeł mógł rozpocząć transmisję takich informacji, musi o tym poinformować wcześniej w odpowiedzi na zapytanie MN. Na tej podstawie węzeł nadrzędny tworzy listę oczekujących CN, według której dane asynchroniczne są później nadawane.
ANALIZA RYNKU SIECIOWEGO
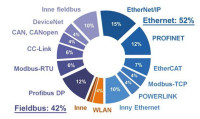
Rys. 1. Wyniki badania rynku przemysłowego pod kątem wykorzystywanych sieci komunikacyjnych (źródło: HMS Industrial Networks, 2018)
Wybór przykładowych protokołów sieci fieldbus i Ethernetu przemysłowego, jak i kolejność, w jakiej zostały one opisane, nie były przypadkowe. Zestawienie to powstało na podstawie wyników analizy globalnego rynku nowo instalowanych urządzeń sieciowych w zakładach przemysłowych, którą w 2017 roku przeprowadziła firma HMS Industrial Networks.
Wynika z niej, że segment Ethernetu przemysłowego zyskiwał na znaczeniu szybciej niż w latach ubiegłych - jego roczny wzrost zwiększył się z 20% do 22%, natomiast udział w całkowitym rynku sieci przemysłowych wyniósł 46%, w porównaniu do 38% rok wcześniej (rys. 1). W tej grupie pierwsze pozycje zajmowały: EtherNet/IP oraz Profinet, z jednakowym udziałem wynoszącym 11%.
Ten drugi cieszy się popularnością przede wszystkim w Europie Środkowej, zaś z sieci EtherNet/IP korzysta się głównie w Ameryce Północnej. Drugie miejsce globalnie zajmuje EtherCAT (7%), natomiast udział protokołów Modbus-TCP i Ethernet POWERLINK wyniósł zaledwie po 4%.
W dalszym ciągu częściej niż z Ethernetu przemysłowego korzysta się z sieci polowych. Ich udział w światowym rynku sieci przemysłowych według HMS wyniósł 48%, co oznacza spory spadek w porównaniu do wyniku sprzed roku (58%). Pierwszą pozycję w tym segmencie zajmuje protokół Profibus DP (14%). Udział sieci Modbus-RTU oraz CC-Link wyniósł po 6%, CANopen - 5%, natomiast DeviceNet tylko 4%.
W ujęciu regionalnym w Europie i na Środkowym Wschodzie wciąż najwięcej jest sieci Profibus, jednak najszybciej przybywa tych w oparciu na protokole Profinet. Na rynku amerykańskim dominują sieci oparte na protokole CIP. Warto dodać, że pod względem udziałów w tym regionie EtherNet/IP wyprzedził sieci DeviceNet. Jeśli chodzi o rynek azjatycki, to jest on bardzo rozdrobniony, przez co żaden protokół nie dominuje - szeroko używane są sieci Profibus oraz Profinet, EtherNet/IP, Modbus czy CC-Link, w tym na znaczeniu zyskuje protokół CC-Link IE, tak jak i EtherCAT.
Z analizy firmy HMS wynika również, że popularyzują się sieci bezprzewodowe (patrz: ramka). Ich roczny wzrost wyniósł 32% (rok wcześniej 30%), zaś udział zwiększył się z roku na rok z 4% do 6%. W rezultacie łączny udział sieci bezprzewodowych i Ethernetu przemysłowego przekroczył 50%.
Bezpieczeństwo sieci
Korzystanie z jednej sieci od poziomu urządzeń polowych aż po ogólnodostępne systemy informatyczne firmy, które dodatkowo zazwyczaj są podłączone do Internetu, uniemożliwia odseparowanie systemów automatyki od zewnętrznych zagrożeń. To z kolei otwiera przestępcom dostęp do kluczowych instalacji zakładu. Podjęcie szkodliwych działań jest dla nich wówczas tym łatwiejsze, że w większości protokołów przemysłowych dane nie są szyfrowane. Tej metody ochrony ważnych informacji nie praktykuje się w tym zastosowaniu, ponieważ szyfrowanie i deszyfrowanie danych zwiększałoby zarówno koszty, jak i opóźnienia w transmisji. Inaczej jest w przypadku sieci fieldbus, które zazwyczaj nie są łączone z innymi sieciami. W ten sposób automatycznie tworzy się bariera bezpieczeństwa izolująca krytyczne systemy zakładu. W takim przypadku, aby uniknąć ingerencji osób niepowołanych w ich funkcjonowanie, wystarczy, że kontrolowany będzie fizyczny dostęp do sieci i komponentów systemu automatyki. Jak poprawić bezpieczeństwo? W przypadku korzystania z ogólnodostępnego Ethernetu taki środek zapobiegawczy nie będzie już wystarczający. Na szczęście są inne sposoby, które zmniejszają zagrożenia dla cyberbezpieczeństwa zakładów przemysłowych. Można na przykład odizolować sieć na wzór sieci polowych, czyli wydzielić fragment systemu automatyki, na przykład organizując go w oparciu o pojedynczy sterownik i wiele urządzeń polowych. Sposób ten sprawdza się w małych zakładach, natomiast w większych takich niezależnych sieci trzeba by utworzyć więcej. Ich bezpieczeństwo można dodatkowo poprawić, korzystając ze switchy zarządzalnych, w których implementowane są różne mechanizmy zabezpieczeń, m.in. IGMP (Internet Group Management Protocol) i QoS (Quality of Service), które będą blokować niepożądany ruch sieciowy, na przykład będący skutkiem działania złośliwego oprogramowania. W przypadku gdy nie ma możliwości fizycznego odseparowania sieci krytycznych, warto zastosować separację logiczną w ramach wirtualnych sieci lokalnych (VLAN). Jeżeli z kolei połączenie newralgicznej sieci z siecią ogólnodostępną jest konieczne, w ochronie tej pierwszej pomocny będzie m.in. firewall. |
 Przedstawiając argumenty za i przeciw sieciom fieldbus i Ethernetowi przemysłowemu, nie można pominąć kwestii bezpieczeństwa. Najczęściej przy tej okazji wymieniane są zagrożenia, jakie niesie ze sobą fakt, że Ethernet wykorzystuje się nie tylko do przesyłu danych z systemów automatyki, które w przypadku sieci fieldbus są izolowane, ale równocześnie przesyła się nim informacje z innych systemów w przedsiębiorstwie.
Przedstawiając argumenty za i przeciw sieciom fieldbus i Ethernetowi przemysłowemu, nie można pominąć kwestii bezpieczeństwa. Najczęściej przy tej okazji wymieniane są zagrożenia, jakie niesie ze sobą fakt, że Ethernet wykorzystuje się nie tylko do przesyłu danych z systemów automatyki, które w przypadku sieci fieldbus są izolowane, ale równocześnie przesyła się nim informacje z innych systemów w przedsiębiorstwie.SPECYFIKA SIECI A JEJ ZASTOSOWANIE
Chociaż mogłoby się wydawać, że wprowadzenie technologii Ethernetu do sieci przemysłowych sprawi, że granica między nimi a "zwykłymi" sieciami stopniowo zacznie się zacierać, nie ulega wątpliwości, że fundamentalnie różnią się one wymaganiami, jakie stawiają im ich zastosowania. Zasadnicza różnica polega na tym, że sieci przemysłowe połączone są z urządzeniami i systemami, których parametry oraz działanie za ich pośrednictwem monitorują i zmieniają inne urządzenia albo systemy. Dlatego oczekuje się od nich, że m.in. będą bardziej niezawodne oraz umożliwią wymianę danych w czasie rzeczywistym. W zależności od specyfiki gałęzi przemysłu albo rodzaju produkcji wymagania te mogą się nieco różnić.
Na przykład w produkcji dyskretnej wyroby na kolejnych etapach mają skończoną formę, dlatego poszczególne stanowiska są w zasadzie autonomiczne i wymagają przeważnie łączności tylko na wyższym poziomie, na przykład z głównym system zarządzania zakładem. Z kolei w produkcji procesowej poszczególne fazy produkcji zazębiają się oraz charakteryzuje je duża dynamika, w związku z czym konieczna jest niezawodna komunikacja w czasie rzeczywistym na najniższym poziomie. W automatyce budynkowej różnorodność struktur budynków znajduje odzwierciedlenie w różnorodności topologii sieciowych. Specyficzne dla instalacji dystrybucji mediów użytkowych są natomiast duże odległości. Podobne wymagania dotyczą sieci w systemach transportowych, na przykład w sterowaniu ruchem pociągów. W tym przypadku dochodzą też kwestie bezpieczeństwa. Jeśli z kolei chodzi o komunikację w obrębie maszyn albo pojazdów, to ponieważ sieci są skupione na bardzo małym obszarze, są narażone na trudne warunki pracy (wysokie temperatury, zaburzenia elektromagnetyczne), zaś od ich niezawodności zależy bezpieczeństwo korzystających z danego sprzętu.
Bartłomiej BeszTurck
Sieci polowe od ponad 20 lat stanowią podstawę rozwiązań w automatyce przemysłowej. Urządzenia dla Profibus-DP, DeviceNet, CANopen czy Modbus-RTU stanowią podstawę wielu wdrożeń i z powodzeniem zrealizowanych aplikacji. Nie istnieje zatem realne zagrożenie, by sieci te z dnia na dzień straciły na znaczeniu. Ze względu na swego rodzaju hermetyczność rozwój klasycznych rozwiązań nie jest już jednak tak dynamiczny. Przemysł 4.0, IoT - koncepcja gromadzenia, przetwarzania i wymiany danych poprzez sieć, infrastruktury chmurowe wymagają znacznie szerszego dostępu do informacji. Takie możliwości daje standard Ethernet. Na jego bazie rozwinęły się takie protokoły jak Profinet-IO, Ethernet/IP czy Modbus-TCP. Dzięki poprawie parametrów oraz unifikacji topologii sieci, jakie niesie za sobą jego stosowanie, Ethernet stał się dominującą technologią. Obecnie coraz trudniej znaleźć na rynku urządzenia niemające funkcji wspierających ten standard. Ułatwia to scalanie systemów pracujących w różnych miejscach zakładów przemysłowych. Producenci widzą potencjał, jaki drzemie w integracji urządzeń na bazie Ethernetu dlatego obszar możliwych zastosowań rozwiązań polowych przesuwa się w kierunku aplikacji specjalistycznych, a Ethernet jawi się jako podstawowy sposób komunikacji w automatyce. Niemniej jednak nie upatrywałbym dominacji tylko jednego z wymienionych standardów. Wręcz przeciwnie, wydaje się pewne, że protokoły na bazie Ethernetu oraz rozwiązania polowe będą ze sobą koegzystowały. |
FIELDBUS VS. ETHERNET
Tematy numerów APA w przyszłości
Zarówno sieci fieldbus, jak i Ethernetu przemysłowego spełniają podstawowe wymagania stawiane sieciom w przemyśle. Dlatego w praktyce to ich specyficzne cechy decydują o tym, który typ sieci lepiej sprawdzi się w danym zastosowaniu.
Jeżeli chodzi o Ethernet, to do jego głównych zalet zalicza się dużą prędkość transmisji oraz, w razie zastosowania światłowodów, możliwość budowy rozległych sieci, co ułatwia organizację rozproszonych systemów sterowania. Użycie światłowodów pozwala również ograniczyć zakłócenia transmisji występujące w sieciach z okablowaniem miedzianym powodowane zaburzeniami elektromagnetycznymi emitowanymi przez maszyny.
Pierwsza z wymienionych zalet Ethernetu może się jednak w pewnych zastosowaniach okazać zbędna - duża prędkość transmisji nie jest na przykład wymagana w systemach regulacji wolno zmieniających się wielkości. Jeżeli weźmiemy pod uwagę zadanie przestawiania zaworów w celu zmiany temperatury cieczy w zbiorniku, to ilość jednorazowo przesyłanych danych jest rzędu tylko pojedynczych bajtów, natomiast ustawienia zaworów aktualizowane są z częstością rzędu sekund, dziesiątek sekund, a nawet minut w przypadku dużych zbiorników. Możliwość uzyskania czasów transmisji rzędu milisekund w tym wypadku pozostawałaby zatem całkowicie niewykorzystana.
Z drugiej strony prędkości transmisji rzędu Mb/s, które są osiągalne w sieciach fieldbus, nie są z pewnością wystarczające do przyszłych potrzeb. Wraz z rozwojem Przemysłowego Internetu Rzeczy (Industrial Internet of Things) i innych technologii, w których postępu możemy się spodziewać w erze Przemysłu 4.0, istnieją uzasadnione obawy, że nawet Ethernet o prędkości transmisji 1 Gb/s nie podoła ilości danych, które będą przesyłane w sieciach przemysłowych.
Popularność Ethernetu w LAN sprawia także, że niezbędny sprzęt sieciowy jest powszechnie dostępny. Ponadto na jego produkcję nie ma monopolu żaden konkretny producent, a urządzenia różnych marek są kompatybilne. Dzięki temu rozbudowa instalacji, integracja z innymi sieciami w przedsiębiorstwie i podłączenie do Internetu oraz wymiana uszkodzonych lub awaryjnych urządzeń są łatwe.
Konkurencja między dostawcami sprawia również, że urządzenia sieciowe są stosunkowo tanie. Powszechna jest też wiedza na temat Ethernetu, dzięki czemu nie brak kadry wyszkolonej w zakresie instalacji i konserwacji takich sieci. Wszystkie wyżej wymienione cechy Ethernetu sprawiają, że wdrożenie sieci na nim opartej może się okazać tańsze niż sieci fieldbus.
Monika Jaworowska







































