
Rozwiązania automatyki w rolnictwie można podzielić na kilka kategorii. Jednym z kryteriów klasyfikacji jest miejsce pracy. Generalnie zautomatyzowane maszyny wykorzystywane w tej gałęzi gospodarki są dzielone na użytkowane w budynkach gospodarstw rolnych albo w polu. Przykładem pierwszych są roboty udojowe.
Roboty udojowe
Roboty udojowe, inaczej zautomatyzowane systemy dojenia (Automatic Milking System, AMS), to stanowiska w obrębie których bez udziału ludzi krowy są dojone, a często równocześnie również karmione. Pierwsze AMS zostały uruchomione w latach 90. zeszłego wieku i stale zyskują na popularności. Wciąż są też udoskonalane przez producentów. Wynika to z licznych korzyści jakie przynoszą, odciążając pracowników gospodarstwa i pozwalając lepiej kontrolować zdrowie krów oraz jakość mleka. AMS dostępne są w różnych konfiguracjach.
W niektórych bydło jest kilka razy dziennie przyprowadzane na stanowisko dojenia i ustawiane w sposób zorganizowany, na przykład w boksach dookoła automatu, który został skonstruowany na planie koła. W innych natomiast krowy są dojone wtedy, kiedy tego "chcą". Zwierzęta z czasem bowiem przyzwyczajają się do odwiedzania boksów AMS wówczas, kiedy mają pełne wymiona. Dodatkowo są do tego zachęcane przez wystawianie paszy.

Tego rodzaju systemy określane są jako Voluntary Automatic Milking System. Zapewniają większą swobodę krowom i zwalniają pracowników gospodarstwa z obowiązku przestrzegania regularności dojenia. VAMS przeważnie składają się z: kabiny albo klatki, ramienia robota, które przymocowuje kubki udojowe dojarki do wymion krowy, elektronicznego systemu identyfikowania zwierząt oraz dojarek.
Jak przebiega dojenie w vams?
System zautomatyzowanego dojenia działa typowo w następujący sposób: zwierzę wchodzi do klatki i na wstępie jest identyfikowane za pomocą znacznika przymocowanego do kopyta, szyi albo ucha. Na tej podstawie system zarządzania robotem udojowym sprawdza, czy dane zwierzę może zostać wydojone. Jeżeli z różnych przyczyn, na przykład zdrowotnych albo krowa niedawno została wydojona, mleko nie powinno być pobierane, automatycznie otwiera się przednia bramka i zwierzę jest wypuszczane.
W przeciwnym razie wymiona są czyszczone, a następnie podłączone zostają kubki udojowe. Po zakończeniu poboru mleka te ostatnie są zdejmowane, a strzyki wymion są dezynfekowane przez spryskanie specjalnym płynem. W czasie dojenia krowy są dokarmiane. Mleko jest odprowadzane do oddzielnych zbiorników lub do jednego, wspólnego. System VAMS gromadzi także różne dane dotyczące dojonej krowy oraz jakości jej mleka.
Operacje vams w szczegółach
Dojenie zautomatyzowane, podobnie zresztą jak dojenie ręczne, ze względu na specyfikę zadania poboru mleka, które wymaga kontaktu z żywym stworzeniem, nie należy do najłatwiejszych w realizacji. Operacje, które sprawiają trudność ludziom, także w przypadku robotów udojowych wymagają implementowania specjalnych rozwiązań. Najtrudniejszą z czynności jest mocowanie kubków udojowych.
Przed ich założeniem robot najpierw lokalizuje wymię i poszczególne strzyki. W tym celu w systemach naprowadzania wykorzystywane są czujniki różnego typu – zwykle są to sensory wizyjne i/albo laserowe. Za ich pomocą wymiona są skanowane, a następnie ramię robota zostaje wypozycjonowane i zakłada kubki na strzyki. Szybkość ich mocowania jest różna w zależności od możliwości systemu VAMS i warunków, w jakich się to odbywa. Wśród najważniejszych czynników, które na to wpływają, wymienić trzeba: ruchliwość krowy, wielkość i kształt jej wymion, rozmiary strzyków. Typowo zajmuje to od kilkudziesięciu sekund do nawet kilku minut. Położenie wymion oraz strzyków danej krowy jest zapisywane w pamięci systemu VAMS przy pierwszym udoju. To ułatwia mocowanie kubków w przyszłości.
Przepływ mleka jest monitorowany
Następnie system sprawdza, czy kubki zostały właściwie zamocowane. Jest to oceniane na podstawie pomiaru przepływu mleka – jeżeli po określonym czasie od założenia kubków mleko nie płynie, dany kubek jest zdejmowany i zakładany ponownie. Zwykle również niewielka ilość mleka (typowo kilka mililitrów) nieco gorszej jakości pobieranego na początku każdego udoju z każdej ćwiartki wymion jest odprowadzana do oddzielnego zbiornika.
Przez cały czas dojenia czujniki przepływu monitorują ilość mleka. Dzięki porównywaniu jej z wartościami typowymi dla danej ćwiartki wymienia system zapobiega sytuacji, w której dojarka wciąż zasysa, chociaż w danej części wymienia nie ma już mleka, jak też pozostawianiu mleka w wymieniu w zbyt dużej ilości. Obie sytuacje są niekorzystne dla zdrowia zwierzęcia. W efekcie zazwyczaj kubki udojowe nie są zdejmowane ze strzyków jednocześnie. Roboty są także zwykle zaprogramowane tak, żeby w razie zerwania przez krowę kubka, pod warunkiem że ćwiartka wymienia została opróżniona na przykład co najmniej w trzech czwartych, nie zakładać go ponownie.

Pomiary i wyposażenie dodatkowe vams
Stale monitorowana jest też jakość mleka. Niezależnie dla każdej ćwiartki wymienia kontrolowane są typowo: barwa mleka (pod kątem występowania krwi), zawartość tłuszczu, białka i laktozy, przewodność oraz temperatura mleka. Monitorowana jest również liczba komórek somatycznych – parametr ten odgrywa kluczową rolę w nadzorowaniu stanu zdrowia zwierzęcia, jego odchylenia od normy mogą bowiem świadczyć o tym, że krowa cierpi na zapalenie wymienia. Oprócz jakości mleka w systemach VAMS mierzone są też, niezależnie dla każdego zwierzęcia, m.in.: jego masa, ilość dostarczanego mleka, czas dojenia, szybkość oddawania mleka, liczba udojów, ilość zjedzonej paszy, ruchliwość na stanowisku dojenia.
Ważnym aspektem zautomatyzowanego udoju jest dochowanie najwyższych standardów w zakresie higieny. Zapobiega to przenoszeniu się chorób między krowami i ułatwia utrzymanie wysokiej jakości produkowanego mleka. Dlatego standardowym elementem wyposażenia stanowisk z robotami udojowymi są instalacje czyszczące i odkażające. Na przykład po wydojeniu każdej krowy dezynfekowane są szczotki używane do mycia wymion. Oprócz tego częścią VAMS są zwykle również systemy mycia parą wodną kubków udojowych.
Wykorzystanie tego czynnika czyszczącego ma wiele zalet, w tym: dużą skuteczność mycia i stosunkowo niskie koszty. Dzięki temu, że do odkażania nie używa się środków chemicznych, ogranicza się też negatywny wpływ na środowisko.
Maszyny specjalne – zadania do zautomatyzowaniaPojazdy specjalne używane w budownictwie, górnictwie, transporcie czy usługach komunalnych stanowią nagromadzenie rozwiązań automatyki. Potencjał w zakresie operacji, którymi można zdalnie sterować, jest w nich bowiem spory. Przykładowo w wozach strażackich zautomatyzowana jest obsługa węży oraz drabiny. Operator może zdalnie regulować długość, kąt nachylenia oraz obroty tej ostatniej, jak również położenie kosza wysięgnika. Pojazdy te są także wyposażane w różne automatyczne zabezpieczenia, na przykład przed uszkodzeniem drabiny podczas jej składania lub zgubieniem sprzętu na skutek niedomknięcia drzwi pojazdu. 
W dźwigach oraz podnośnikach również można zdalnie sterować wysięgnikiem. Automatycznie regulowane jest położenie kabiny w poziomie, co zapobiega jej nadmiernym przechyłom. W betoniarkach zautomatyzowany jest proces przygotowania mieszanki i wylewania betonu. Z kolei w wywrotkach operator zdalnie steruje skrzynią ładunkową, w koparkach łopatą, zaś w śmieciarkach podnoszeniem oraz opróżnianiem pojemników z odpadami. Wraz z rozwojem technologii automatyka w pojazdach specjalnych ewoluuje z systemów zdalnego sterowania w kierunku pełnej autonomii. Podobnie jak w przypadku maszyn rolniczych, także w tym przypadku niesie to ze sobą szereg wyzwań (patrz: kolejna ramka). |
Zautomatyzowane zbiory
Podobnie jak w robotach udojowych mających kontakt ze zwierzęciem, również w maszynach, które automatyzują zbiory, manipulując płodami rolnymi, wymagane jest wdrażanie specjalnych rozwiązań. W przeciwieństwie do AMS, które są w użytku już od lat, te drugie są w większości jednak dopiero na etapie opracowywania prototypów, zwłaszcza w przypadku owoców i warzyw charakteryzujących się delikatną strukturą, jak na przykład sałaty czy jagód. Świadczy to o tym, jak mimo ogromnego postępu technologicznego, jaki się dokonuje, wciąż trudno jest wprowadzić roboty tego typu do użytku. Przed jakiego rodzaju wyzwaniami stoją ich projektanci, wyjaśniamy dalej na przykładzie automatu zbierającego truskawki.
Robot tego typu powinien sekwencyjnie wykonywać przynajmniej następujące czynności: najpierw musi zlokalizować owoc, następnie powinien ocenić, czy nadaje się on do zerwania i dopiero wówczas zdjąć owoc z krzaka. Aby automat działał wydajnie, a jakość truskawek nie uległa pogorszeniu, na każdym z tych etapów trzeba rozwiązać szereg problemów.
Robot w truskawkach – największe wyzwania
Każdy, kto zbierał truskawki, zdaje sobie sprawę, że znalezienie wszystkich owoców wymaga dokładnego przeszukania krzaka, w tym rozchylania łodyg oraz zaglądania pod liście. Ten etap jest trudny do zautomatyzowania. Tradycyjnie bowiem najpierw należy wyznaczyć trajektorię ruchu ramienia robota. Tymczasem w tym przypadku w pierwszym kroku powinno ono usunąć przeszkody, czyli rozsunąć liście, żeby przeskanowanie krzaka oraz zaplanowanie operacji zdejmowania owoców było w ogóle możliwe. W efekcie ramię robot może mieć trudności z dotarciem do owoców najbardziej zagnieżdżonych.
W kolejnym kroku należy odróżnić truskawki dojrzałe od tych jeszcze niedojrzałych, jak również rozpoznać owoce uszkodzone albo zgniłe, nienadające się z tego powodu do zerwania. Ten etap, dzięki dostępności skutecznych algorytmów rozpoznawania obrazów, których możliwości w ostatnim czasie są jeszcze rozszerzane przez rozwój sztucznej inteligencji, nie jest aż tak trudny w realizacji. W tym zakresie można się też posiłkować rozwiązaniami już wykorzystywanymi w przemysłowych systemach wizyjnych, uwzględniając przy tym specyfikę zbioru owoców odbywającego się na zewnątrz, w różnych warunkach atmosferycznych.
Wyzwaniem jest natomiast finalny krok, czyli zdejmowanie owoców z krzaka, truskawki bowiem są owocami o delikatnej strukturze – ściśnięte zbyt mocno ulegają uszkodzeniom się, a uszkodzone nie tylko wyglądają nieapetycznie, ale również szybciej się psują. Jeżeli zatem chwytaki robota użyją zbyt dużej siły mogą owoc zgnieść, natomiast w przeciwnym razie owoc w trakcie przenoszenia może się z uchwytu wyślizgnąć. Sprawę komplikuje fakt, że przykładaną siłę powinno się regulować na bieżąco, bowiem niektóre owoce mogą być umocowane do łodygi mocniej niż inne.

Jakie są zalety automatyzacji zbiorów?
Z czasem z pewnością powyższym wyzwaniom uda się sprostać, zwłaszcza że prowadzone są liczne projekty badawcze w tym zakresie, a naciski na wprowadzenie tego typu robotów do powszechnego użytku rosną. Wynika to stąd, że automatyzacja zbiorów płodów rolnych przyniesie liczne korzyści, na przykład pomoże ograniczyć marnowanie żywności.

Przeważnie bowiem po tym, jak plony z pola zostaną zebrane nie opłaca się ponownie sprawdzać, czy te, których wcześniej nie zerwano, ponieważ były niedojrzałe, już nadają się do zebrania. Tymczasem w razie zautomatyzowania tej czynności pole mogłoby być bez nadmiernego zwiększania kosztów wielokrotnie pod tym kątem przeglądane.
Roboty zbierające płody rolne są oprócz tego odpowiedzią na narastający problem niedoborów pracowników w rolnictwie, podobnie jak traktory autonomiczne. Te ostatnie oprócz tego, że będą odciążać rolników, zwłaszcza w okresie dużego natężenia prac rolnych, eliminując czynnik ludzki, zapewnią również większą precyzję wykonywania zadań, na przykład równomierniejsze opryski.
Autonomiczne koparkiJeżeli chodzi o autonomiczność pojazdów specjalnych, na celowniku konstruktorów znajdują się szczególnie te, które są wykorzystywane w pracach ziemnych. Przykładem są koparki i różnego typu sprzęt górniczy. W przypadku tego ostatniego dąży się do całkowitej autonomii – w przyszłości można się więc spodziewać, że powstaną w pełni bezzałogowe kopalnie. Operatorzy będą w nich pełnić funkcję wyłącznie nadzorczą, interweniując tylko w sytuacjach awaryjnych zdalnie, przebywając w oddalonym centrum sterowania. Na rozwiązanie takie z pewnością oczekują zwłaszcza właściciele złóż na terenach trudno dostępnych, na przykład w Australii. W konstrukcji autonomicznych koparek sprostać trzeba szeregowi wyzwań. Takim jest planowanie rozkładu ładunku wyładowywanego przez łopatę na skrzynię ciężarówki. Jego nierównomierne rozłożenie może bowiem mieć groźne konsekwencje, powodując na przykład wywrócenie się pojazdu, wysypanie ładunku, nierównomierne zużycie opon. 
Podobnie jak w przypadku autonomicznych ciągników o upowszechnieniu się autonomicznych koparek zdecyduje skuteczność działania systemu wykrywania kolizji. Od niego zależeć będzie bowiem wydajność i bezpieczeństwo zadania, które te maszyny wykonują. Na każdym z jego etapów (wykopanie ziemi, jej nabranie łyżką, rozładunek) łatwo o zderzenie. W związku z tym system sterowania koparką powinien móc zapobiec kolizji: czerpaka z gąsienicami i kabiną koparki, czerpaka z elementami otoczenia, na przykład sprzętem pracującym w pobliżu i czerpaka ze skrzynią ciężarówki, którą załadowuje. Żeby było to możliwe, system detekcji kolizji musi być w stanie dokładnie ustalić względne położenie koparki i jej czerpaka. W tym celu wykorzystuje się wbudowywane m.in. w łopatę czujniki laserowe lub radarowe skanujące otoczenie. Na podstawie danych z czujników w koparce w połączeniu z tymi z systemu GPS, wykorzystując algorytmy sztucznej inteligencji, autonomiczne pojazdy będą się w stanie uczyć topografii terenu, po którym mają się poruszać i planować najbardziej optymalne trasy przejazdu. Zarządzanie wyposażeniem na przykład bezzałogowych kopalni ułatwi wdrożenie nowych technologii, głównie Internetu Rzeczy, w zakresie predykcyjnego utrzymania ruchu. Sensory monitorujące m.in.: ciśnienie w oponach, temperaturę płynów chłodzących, ich ciśnienie, poziom oraz stopień czystości, temperaturę i poziom wibracji łożysk, temperaturę i ciśnienie w układzie hamulcowym, ułatwią przewidywanie problemów eksploatacyjnych i reagowanie na nie na bieżąco. |
Autonomiczne traktory – bezpieczeństwo jest priorytetem
W przypadku tego rodzaju ciągników również trzeba sprostać szeregowi wyzwań związanych z zadaniem, jakie mają wykonywać. Należą do nich: optymalizacja ścieżek, po których traktor się porusza, tak żeby jak najefektywniej i najdokładniej wykonał na przykład oprysk pola środkami chwastobójczymi oraz różne operacje dodatkowe, jak monitorowanie stanu upraw czy gleby. W przyszłości, kiedy w użytku w obrębie jednego gospodarstwa będą całe floty autonomicznych maszyn rolniczych, wyzwaniem będzie też z pewnością zarządzanie, koordynowanie oraz optymalizacja ich ruchu. O ich upowszechnieniu się zdecyduje jednak przede wszystkim niezawodność oraz bezpieczeństwo, analogicznie zresztą jak w przypadku samochodów autonomicznych.
Chociaż bowiem pewnie codziennie dochodzi do wypadków z udziałem maszyn rolniczych, nawet jednorazowe zdarzenie, w którym ucierpi człowiek lub zwierzę, a które zostało spowodowane przez traktor bez kierowcy, zniechęci potencjalnych użytkowników do wszystkich tego typu maszyn. Ich negatywne nastawienie później bardzo trudno jest zmienić.

Detekcja przeszkód w autonomicznych ciągnikach
Z kilku powodów wykrywanie przeszkód, na które podczas pracy mogą się natknąć autonomiczne traktory, jest bardzo trudne. Przede wszystkim tego typu maszyny działają w otoczeniu, które jest bardzo niejednorodne. Na przykład trzeba się liczyć z tym, że powierzchnia gleby jest nierówna, uprawiane rośliny mogą występować w większym skupieniu, a miejscami się przerzedzać, poza tym różnią się wielkością i/lub kształtem w nieregularny sposób. Sprawę komplikuje fakt, że nie wszystkie przeszkody, które napotka na swej drodze ciągnik, powinny spowodować jego zatrzymanie się.
Przykładowo w przypadku natknięcia się na zwisające gałęzie podczas oprysku sadu, kępę wysokiej trawy na polu czy opryskiwane drzewa w sadzie, traktor nie powinien się wyłączać. Jeśli jednak znajdzie się na kursie kolizyjnym na przykład z łopatą wbitą w ziemię, pozostawionym w polu sprzętem rolniczym, zwierzęciem, które biega po polu albo człowiekiem stojącym wśród drzew, powinien się automatycznie zatrzymać i wstrzymać wykonywanie zadania, na przykład wyłączając spryskiwacze.
Trudne warunki pracy w maszynach rolniczych i specjalnychWyposażenie maszyn rolniczych i pojazdów specjalnych powinno się charakteryzować wysoką wytrzymałością na trudne warunki otoczenia, pracują one bowiem na zewnątrz, gdzie działają na nie różne niekorzystne czynniki. Przykładami są: deszcz, śnieg, mgła, kurz, błoto oraz silne nasłonecznienie i skrajnie niskie temperatury. Oznacza to, że podzespoły maszyn rolniczych i specjalnych muszą być przystosowane do częstego i długotrwałego kontaktu z wodą i pyłem i ekstremalnych temperatur oraz ich gwałtownych skoków. 
Wymagana jest także odporność na wibracje i uderzenia przenoszone z układu napędowego albo będące następstwem kontaktu z przeszkodami terenowymi (wyboje, koleiny, zbocza, itp.). Ważna jest poza tym wytrzymałość na duże obciążenia mechaniczne, wahania napięcia zasilania, kontakt z różnymi chemikaliami. Te ostatnie to na przykład smary, rozpuszczalniki, sól drogowa i środki myjące. Problemem są również zaburzenia elektromagnetyczne. Ich występowaniu sprzyja m.in. brak uziemienia, duża liczba urządzeń skupionych na stosunkowo małej powierzchni oraz blisko siebie prowadzone okablowanie. W celu zabezpieczenia przed powyższymi czynnikami w wyposażeniu maszyn rolniczych i pojazdów specjalnych wprowadza się specjalne rozwiązania konstrukcyjne. Przykłady przedstawiamy w kolejnych ramkach. |
Jakie czujniki wykrywają przeszkody?
Systemy sterowania autonomicznymi traktorami stanowią w związku z tym kombinację czujników, rozwiązań z zakresu geolokalizacji, komunikacji w obrębie urządzeń pokładowych, różnych technik przetwarzania obrazów i symulacji. Jeżeli chodzi o te pierwsze, z reguły równocześnie analizowane oraz ze sobą zestawiane są odczyty z kilku czujników różnego typu.
Komponentem systemów detekcji przeszkód są na przykład sensory laserowe, ultradźwiękowe, czujniki wizyjne, w tym kamery termowizyjne. Dane pomiarowe są analizowane w specjalnym oprogramowaniu, które dodatkowo posiłkuje się na przykład danymi z systemu GPS, mapami satelitarnymi oraz modelami symulującymi, jak wygląda otoczenie. W razie napotkania i sklasyfikowania przeszkody system sterowania automatycznie zatrzymuje traktor albo wyznacza ścieżkę alternatywą.
Automatyka w silosach
Nie tylko w zbieraniu plonów rolnych automatyka zyskuje na znaczeniu, wiele zastosowań takie rozwiązania znajdują także na etapie ich magazynowania. Dużą rolę odgrywają na przykład w silosach, w których gromadzone są ziarna zbóż. W obiektach tych automatyzuje się m.in. zadanie przewietrzania ziarna, konieczne do jego schłodzenia albo osuszenia. Jest to alternatywą dla czaso- i pracochłonnego okresowego wysypywania części zboża, zazwyczaj jednej trzeciej, z silosu na zewnątrz, a następnie wsypywania go z powrotem.
Silosy wietrzy się powietrzem atmosferycznym w ramach instalacji z wymuszonym obiegiem powietrza. Składają się na nie zwykle: zespół wentylatorów, nagrzewnic, kanały wentylacyjne oraz otwory wylotowe. Dmuchawy są uruchamiane, kiedy temperatura i/lub wilgotność ziaren osiągają wartości graniczne, i pracują do czasu ich obniżenia do wartości optymalnych. Wyłączają się poza tym wówczas, gdy parametry powietrza z zewnątrz zasilającego system wentylacji nie gwarantują już skutecznego dalszego wietrzenia, chłodzenia albo osuszania zboża, na przykład jeśli jest ono za suche, zbyt wilgotne, za ciepłe lub zbyt zimne. Dlatego na przykład latem ziarna w silosach schładza się głównie nocą, o ile częścią systemu nie jest chłodziarka obniżająca temperaturę powietrza.
Konstrukcje heavy dutyPodstawowym zabezpieczeniem wyposażenia maszyn rolniczych i pojazdów specjalnych jest obudowa. Wykonuje się ją z materiałów o dużej wytrzymałości mechanicznej i odpornych na działanie czynników korozyjnych. Może to być stal nierdzewna, aluminium anodyzowane lub mosiądz, pokrywane dodatkowo powłokami ochronnymi. Aby zapobiec wnikaniu wody i zanieczyszczeń przez otwory, na złączach obudowy stosuje się wielostopniowe uszczelnienia albo wykonuje się ją w formie odlewu. Zakres temperatur pracy zwiększa się, wyposażając je w dodatkowy system chłodzenia albo podgrzewania. Kable zabezpiecza się przed uszkodzeniem specjalnymi osłonami, na przykład z PVC (polichlorku winylu), charakteryzującego się dużą wytrzymałością mechaniczną oraz odpornością na działanie środków chemicznych. Inne stosowane materiały to PE (polietylen) odporny na działanie wilgoci, PUR (poliuretan) o dużej wytrzymałości na ścieranie, chemikalia oraz skrajne temperatury. Aby z kolei zwiększyć bezpieczeństwo operatorów, stosuje się okablowanie w powłokach odpornych na płomienie (samogasnących). |
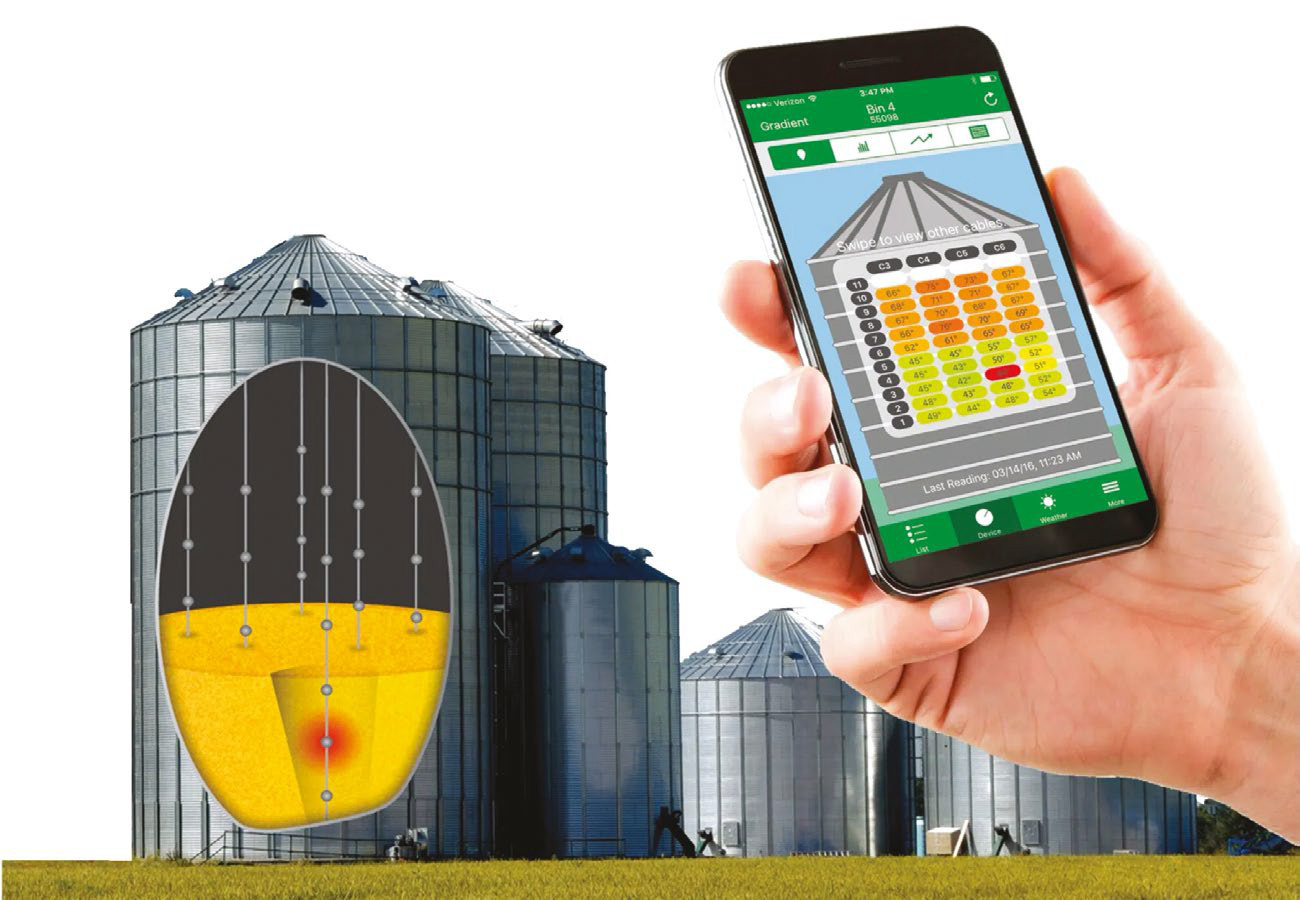
Pomiary w elewatorach
System sterowania instalacją wietrzenia silosów opiera się na pomiarach dwóch wielkości: temperatury i stopnia zawilgocenia ziarna. W tym celu wykorzystywane są przeważnie wielopunktowe przetworniki mierzące pionowy rozkład danej wielkości w zbiorniku. Mają one typowo postać metalowej rury albo węża, wewnątrz których umieszczane są sensory. Zadaniem osłony jest ochrona elementów pomiarowych.
Ponadto zapewnia wytrzymałość liny pomiarowej na zerwanie. Powierzchnia osłony powinna być jak najgładsza, żeby ziarna do niej nie przywierały. W przeciwnym razie, z czasem oblepiając rurę, zafałszowywałyby wyniki pomiaru. W dużych silosach korzysta się często z kilku lin wpuszczanych w głąb zbiornika w różnych miejscach. Punkty pomiarowe są wzdłuż ich długości rozmieszczone w jednakowych odległościach albo każda lina może sprawdzać temperaturę na innych głębokościach i w różnej liczbie punktów. Oprócz temperatury i stopnia zawilgocenia tego typu przetworniki mierzą także stężenie dwutlenku węgla. Wymienione wielkości są kontrolowane, ponieważ od ich prawidłowego poziomu zależy jakość i trwałość zbóż.
Po co mierzyć temperaturę i wilgotność?
W przypadku bowiem silnego zawilgocenia ziaren łatwiej rozwijają się grzyby, pleśnie, insekty. Poza tym sprzyja to oddychaniu i kiełkowaniu zboża. To ostatnie zachodzi szybciej, jeżeli w zbiorniku jest ciepło. W takich warunkach aktywniejsze są również owady, pleśnie oraz grzyby – w niższych temperaturach szkody przez nie czynione postępują wolniej. Jeżeli dopuści się do powstania gorących i wilgotnych skupisk ziaren, nasili się ich oddychanie, a wtedy jeszcze zwiększy się ilość wydzielanych przez nie w tym procesie ciepła i wilgoci. Więcej będą ich produkować również insekty oraz mikroorganizmy rozwijające się w zbożu.
Ponadto ogniska ciepła i wilgoci będą się rozszerzać na resztę zbiorów. Przyczynia się do tego konwekcja oraz to, że ziarno jest dobrym termoizolatorem. Efekt ten można zmniejszyć przez wymieszanie ziaren.
Stężenie dwutlenku węgla mierzy się natomiast dlatego, że nagły wzrost wartości tej wielkości jest ważnym objawem zwiększenia aktywności mikroorganizmów rozwijających się w zbożu. Świadczy to też o ogólnym pogorszeniu się jakości ziaren.
Pomiary poziomu w silosach
Kolejną wielkością, której czujniki są częścią systemów zarządzania pracą elewatorów, jest poziom ich wypełnienia, a dokładniej objętość zgromadzonego w nich ziarna. Na podstawie tej informacji nowo dostarczane zboże zostaje skierowane do silosów, w których jest jeszcze wystarczająco dużo wolnego miejsca.
Zapobiega to sytuacjom, w których ziarno próbowano by umieścić w zbiorniku, w którym się już w takiej ilości nie zmieści. Dzięki temu nie dochodzi do czasem katastrofalnych w skutkach, a w najlepszym razie tylko uciążliwych zdarzeń, jak przepełnienie zbiornika czy zablokowanie się ziaren w kanałach transportowych. Kontrolowanie poziomu wypełnienia silosów ułatwia także zarządzanie zapasami gromadzonych w nich zbóż.
W tym zastosowaniu wykorzystuje się czujniki ultradźwiękowe, radarowe oraz laserowe. Ostatnie pozwalają na przeskanowanie powierzchni kopca, który zwykle formuje wsypywane do elewatora ziarno. Oprócz monitorowania na tej podstawie ilości zboża, w połączeniu z oprogramowaniem o odpowiedniej funkcjonalności pozwala to na wykrycie nieregularności w rozkładzie ziaren, które mają tendencję do przylegania do ścian zbiornika, formowania mostków, stożków oraz obliczenie środka ciężkości.
Takie informacje są użyteczne w wykrywaniu nierównomiernego obciążenia i w analizie naprężeń w strukturze elewatora, które z biegiem czasu powodują pękanie i wybaczanie się jego ścian. Ignorowanie postępu takich uszkodzeń może prowadzić do zawalenia się silosu.
Konstrukcje heavy duty – ciąg dalszyW maszynach rolniczych i pojazdach specjalnych szczególnej uwagi wymagają podzespoły elektroniczne. Chroni się je przez hermetyzację i ekranowanie obudów. Kolejnym newralgicznym komponentem są łożyska. Jednym ze sposobów na zwiększenie ich wytrzymałości na obciążenia mechaniczne jest ich przewymiarowanie. Ich żywotność wydłuża się również, ograniczając zjawisko elektroerozji na skutek przepływu prądów z wału silnika. W tym celu używa się wkładek izolacyjnych. Odporność na wibracje oraz udary mechaniczne uzyskuje się poprzez zabezpieczenie elementów ruchomych, na przykład specjalnymi wkładkami tłumiącymi wstrząsy. Innym rozwiązaniem jest całkowite wyeliminowanie takich komponentów (przykładowo zamiast wentylatorów używa się radiatorów). Gdy nie jest to możliwe, zastępuje się je elementami o większej wytrzymałości. Takie podejście stosuje się m.in. w enkoderach optycznych heavy duty, w których zamiast szklanej tarczy z podziałką instaluje się dysk metalowy lub wykonany z tworzywa sztucznego. Niezawodność wyposażenia maszyn rolniczych i specjalnych zwiększa się też przez redundancję. Na przykład w pomiarach kluczowych wielkości korzysta się z podwójnych sensorów, które są umieszczane w jednej obudowie, ale z oddzielnym zasilaniem i portami komunikacyjnymi. W przypadku maszyn pracujących na zewnątrz trudne warunki tam panujące mogą się odbić negatywnie nie tylko na ciągłości ich działania i żywotności, ale również na komforcie ich użytkowania. Przykładowo zmienne światło naturalne wpływa na czytelność wyświetlaczy. Dlatego, żeby na przykład w przypadku paneli operatorskich uniezależnić ją od oświetlenia zewnętrznego, ich ekrany pokrywa się powłoką antyodblaskową. To pozwala na korzystanie z nich przy silnym nasłonecznieniu. Pracę w nocy ułatwia natomiast podświetlanie monitora. Przeważnie jest ono regulowane automatycznie, dzięki czujnikowi oświetlenia zainstalowanemu w panelu. Podświetlane są również przyciski klawiatury. Dodatkowo wyświetlacze są powlekane specjalnymi powłokami zapobiegającymi ich zaparowaniu. |
Ważenie i transport ziaren
Na koniec warto dodać, że jeszcze zanim ziarno trafido elewatora, przeważnie większość operacji związanych z jego odbiorem od dostawców, kontrolą jakości przed przyjęciem do magazynu oraz transportem jest już automatyzowana. Przykładem jest ważenie ziarna wymagane do rozliczenia się z dostawcą. Realizuje się to przykładowo przez ważenie pojazdów, którymi zboże jest przywożone, najpierw przy wjeździe do zakładu, a potem pustych, po wyładowaniu ziaren. W tym celu używa się zwykle elektronicznych wag z czujnikami tensometrycznymi. Zautomatyzowane jest również pobieranie próbek ziaren poddawanych następnie kontroli jakości.
W zakresie automatyzacji transportu ziaren z kolei popularne są dwa rodzaje metod: mechaniczne, na przykład przenośnikiem ślimakowym oraz pneumatyczne. Do zalet przenośników drugiego typu zalicza się m.in.: kompaktowość i to, że w mniejszym stopniu uszkadzają ziarna.

Podsumowanie
Rozwiązania z zakresu automatyki i pomiarów, jak również najnowszych technologii cyfrowych, z pewnością będą się w rolnictwie upowszechniać. Oprócz wspomnianych w artykule powodów ich popularyzacji, czyli braków siły roboczej oraz dążenia do ograniczenia marnotrawstwa żywności, przyczyni się do tego z pewnością również konieczność zwiększania wydajności produkcji rolnej wymuszana przez rosnące zapotrzebowanie na żywność.
Monika Jaworowska



















