Centrum sterowania jest w ich wypadku kabina z panelem operatorskim lub joystickiem do kierowania narzędziami zamontowanymi na naczepie pojazdu. Bywa ona również wyposażana w system łączności, przez który operator komunikuje się z kierownictwem oraz współpracownikami. Do centrali automatycznie przesyłane są też informacje o aktualnej lokalizacji pojazdów, co ułatwia zarządzanie ich flotą.
Naczepa z kolei stanowi nagromadzenie czujników, sterowników oraz elementów wykonawczych. Dzięki nim w zależności od typu pojazdu zautomatyzowane są różne zadania. W artykule przedstawiamy przykłady zastosowań systemów automatyki w pojazdach specjalnych oraz ich główne komponenty.
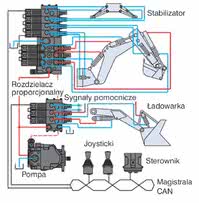
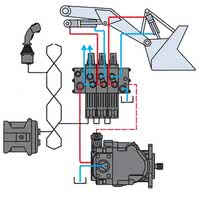
AplikacjeNa rysunku przedstawiono główne elementy wyposażenia ładowarki (łopatę, zestaw zaworów proporcjonalnych, pompę, sterownik, magistralę CAN i joystick) oraz przepływ sygnałów sterujących ruchem wysięgnika i łopaty.
|

ZADANIA ZAUTOMATYZOWANE
 W wozach strażackich zautomatyzowana jest m.in. obsługa węży oraz drabiny. Operator może zdalnie regulować długość, kąt nachylenia oraz obroty tej ostatniej, jak również położenie kosza wysięgnika. Pojazdy te są także wyposażane w różne automatyczne zabezpieczenia, na przykład przed uszkodzeniem drabiny podczas jej składania lub zgubieniem sprzętu na skutek niedomknięcia drzwi pojazdu.
W wozach strażackich zautomatyzowana jest m.in. obsługa węży oraz drabiny. Operator może zdalnie regulować długość, kąt nachylenia oraz obroty tej ostatniej, jak również położenie kosza wysięgnika. Pojazdy te są także wyposażane w różne automatyczne zabezpieczenia, na przykład przed uszkodzeniem drabiny podczas jej składania lub zgubieniem sprzętu na skutek niedomknięcia drzwi pojazdu.
W dźwigach oraz podnośnikach również można zdalnie sterować wysięgnikiem. Automatycznie regulowane jest także położenie kabiny w poziomie, co zapobiega jej nadmiernym przechyłom. W betoniarkach zautomatyzowany jest proces przygotowania mieszanki oraz wylewania betonu.
Z kolei w wywrotkach operator zdalnie steruje skrzynią ładunkową, w koparkach łopatą, a w śmieciarkach podnoszeniem oraz opróżnianiem pojemników z odpadami. W maszynach rolniczych automatycznie regulowane są ustawienia narzędzi, na przykład rozstaw chwytaków oraz wysokość dysz spryskiwaczy.
Ta ostatnia jest dostosowywana do wysokości roślin, tak aby wszystkie otrzymały podobną dawkę danego środka. W logistyce natomiast popularne są w pełni zautomatyzowane pojazdy typu Automated Guided Vehicle (AGV). Używa się ich m.in. do transportu materiałów między stanowiskami produkcyjnymi i montażowymi lub do przewozu materiałów w magazynach.
Aby zapewnić bezpieczeństwo ludziom i mieniu w pobliżu, są one wyposażone w system detekcji kolizji. Ten ostatni instalowany jest także w wózkach widłowych.
ProduktySterownik ClassicController firmy ifm electronic
Urządzenie można programować zgodnie z normą IEC 61131-3 w programie CoDeSys. Dostępne są też gotowe biblioteki wybranych funkcji sterowania. Minimalna temperatura pracy sterownika to -40°C, a maksymalna +85°C. Umieszczono go w obudowie o stopniu ochrony IP67. Charakteryzuje się odpornością na wibracje i udary (EN 60068-2-6, EN 60068-2-64, EN 60068-2-29), wilgotność (EN 60068-2-30), mgłę solną (EN 60068-2-52), testowano go też pod kątem kompatybilności elektromagnetycznej (EN 61000-6-2 i EN 61000-6-4). |
 Sterownik wyposażono w 32-bitowy mikrokontroler serii TriCore firmy Infineon, 16 wejść konfigurowanych jako cyfrowe, analogowe z funkcją diagnostyczną i częstotliwościowe, 16 wyjść konfigurowanych jako PWM z funkcją diagnostyczną oraz ze sterowaniem prądowym lub bez, 4 porty CAN 2.0 A/B (ISO 11898) oraz po jednym porcie RS-232 i USB.
Sterownik wyposażono w 32-bitowy mikrokontroler serii TriCore firmy Infineon, 16 wejść konfigurowanych jako cyfrowe, analogowe z funkcją diagnostyczną i częstotliwościowe, 16 wyjść konfigurowanych jako PWM z funkcją diagnostyczną oraz ze sterowaniem prądowym lub bez, 4 porty CAN 2.0 A/B (ISO 11898) oraz po jednym porcie RS-232 i USB.CZUJNIKI
Niezbędnym komponentem systemów automatyki są czujniki. W pojazdach specjalnych instalowane są głównie bezdotykowe sensory indukcyjne, pojemnościowe, optyczne oraz ultradźwiękowe. Są one używane przede wszystkim do pomiaru odległości.
Na przykład czujniki ultradźwiękowe są częścią systemów regulacji wysokości dysz opryskiwarek, wykrywania kolizji w pojazdach AGV oraz kontroli poziomu napełnienia zbiorników w śmieciarkach, kombajnach i opryskiwarkach. Czujniki indukcyjne z kolei są wykorzystywane m.in. w