
Popularnym typem robotów przemysłowych są roboty przegubowe. Ich konstrukcję opracowano w latach 70. zeszłego wieku na Uniwersytecie Stanforda. Nazwę zawdzięczają złączom między segmentami, z których zbudowane są ich ramiona. Przeguby te mogą się zginać i obracać. Przypominają pod tym względem stawy. Dzięki temu ramię robota porusza się jak ramię ludzkie.
Roboty przegubowe mają sześć stopni swobody, czyli sześć osi ruchu, trzy liniowe i trzy obrotowe. Stąd ich druga nazwa – roboty sześcioosiowe. Na rysunku 1 zaznaczono poszczególne osie ruchu.
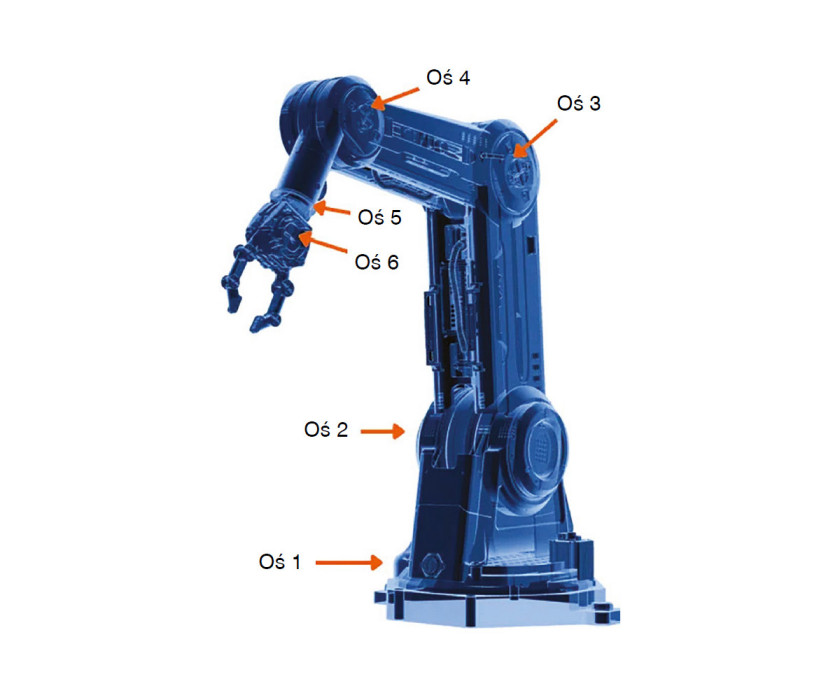
Pierwszą jest oś obrotu robota w poziomie, wokół jego osi pionowej. Druga umożliwia poruszanie ramieniem góra–dół. Trzecia pozwala na jego zginanie i prostowanie "w łokciu". Czwarta oś umożliwia pochylanie i odchylanie segmentu nadgarstka, zaś piąta i szósta pozwalają na obracanie zamocowanego w nim chwytaka albo narzędzia.
Głównie zalety robotów przegubowych to: wszechstronność i duży udźwig – są w stanie podnosić ładunki ważące ponad tonę. Ich główną konkurencją są roboty delta, kartezjańskie i SCARA. Decyzję co do wyboru konkretnego modelu robota powinno poprzedzić zestawienie cech różnych typów tych maszyn z wymogami zadania.
delta
Tytułową konstrukcję opracowano na początku lat 80. zeszłego wieku na politechnice w Szwajcarii. Nazwa nawiązuje do czwartej litery greckiego alfabetu ze względu na kształt odwróconego trójkąta. W porównaniu do pozostałych typów robotów przemysłowych roboty delta mają unikalną budowę i kinematykę. Wyróżnia je oprócz tego sposób instalacji – standardem w ich przypadku jest montaż nad obszarem roboczym, którym zwykle jest przenośnik linii produkcyjnej. Mają cztery osie ruchu: trzy liniowe i jedną obrotową.
Roboty delta zbudowane są z podstawy i ramion. Podstawa, mocowana na przykład do sufitu, ma zazwyczaj kształt trójkątny albo okrągły. Do niej przymocowane są cienkie ramiona zbudowane z segmentów z ruchomymi przegubami, zakończone chwytakiem. Ramiona poruszają się w sposób skoordynowany, przemieszczając chwytak. Podstawa wraz z ramionami nadają robotom tego typu charakterystyczny wygląd pająka. Mają one szereg zalet.
Co wyróżnia roboty delta?
Silniki robotów delta są całkowicie zamknięte w podstawie. Dzięki temu łatwo uzyskuje się wysoki stopień ochrony IP. Umiejscowienie silnika oraz ramiona wykonywane jako lekkie dzięki doborowi materiałów pozwalają na uzyskanie prędkości nieosiągalnych przez inne typy robotów. Stabilność podstawy zapewnia precyzję ruchów.
Zalety te są cenione szczególnie w aplikacjach pick and place, na przykład w montażu, pakowaniu i sortowaniu. Poza tym roboty delta zajmują przestrzeń w pionie nad obszarem roboczym, która nie jest zagospodarowywana przez roboty montowane na podłodze. Dzięki temu efektywniej wykorzystują dostępne miejsce.
Z drugiej strony duża szybkość robotów tego typu jest uzyskiwana kosztem ładowności i zasięgu. Zazwyczaj ich udźwig nie przekracza kilku kilogramów, co znacząco zawęża zakres zastosowań. Kolejnym ograniczeniem jest przestrzeń robocza w kształcie stożka. Z tego powodu, sięgając niżej, robot ma ograniczony zasięg w poziomie.
Roboty w przemyśle – popularne aplikacjeSpawanie
Roboty są wykorzystywane głównie w spawaniu łukowym (MIG, TIG), zgrzewaniu i spawaniu laserowym. Przeważnie łączą materiały w postaci blach, chociaż przestrzeń robocza robotów wieloosiowych, wyposażonych w czujniki i przy wykorzystaniu odpowiedniego osprzętu, zapewnia w tym zakresie większą elastyczność. Robot spawalniczy wykonuje zadanie, przemieszczając się po zaprogramowanej ścieżce ruchu albo jest sterowany wizyjnie. Zdarzają się kombinacje obu tych metod. Możliwe są dwie konfiguracje stanowiska. W pierwszej to robot manipuluje palnikiem, łącząc nieruchome detale, zaś w drugiej wykorzystywany jest stacjonarny palnik, a zadaniem robota jest odpowiednie ustawienie względem niego spawanych części. W tym zastosowaniu popularne są dwa typy tych maszyn: kartezjańskie i przegubowe. Zrobotyzowane stanowiska spawania mają wiele zalet. Są to: kilkakrotnie większa wydajność w porównaniu ze spawaniem ręcznym, mniejsze koszty pracy dzięki zwolnieniu wykwalifikowanych (i wysoko opłacanych) spawaczy z wykonywania powtarzalnych spawów na rzecz zadań bardziej wymagających i oszczędnościom na szkoleniach, lepsza oraz powtarzalna jakość spoin, uzyskiwana przy mniejszym zużyciu materiałów, oszczędności dzięki mniejszej liczbie spawów wymagających poprawek i blach przeznaczonych do zezłomowania. |
Roboty kartezjańskie

Tytułowe roboty, których nazwa nawiązuje do układu współrzędnych, mają trzy ortogonalne osie ruchu skoordynowane przez jeden kontroler. Stanowią je siłowniki liniowe, z zamocowanym na karetce, na najbardziej zewnętrznej osi, narzędziem. Są projektowane do poruszania się w osiach XY, XZ albo XYZ.
Podkategorią robotów kartezjańskich są roboty bramowe (suwnicowe, portalowe, gantry), od tych w wersji podstawowej różniące się konstrukcją i będącymi jej konsekwencją cechami użytkowymi. Występują one w konfiguracji 2XY lub 2XYZ, czyli z dwoma równoległymi osiami bazowymi (X). Zasadnicza różnica pomiędzy robotami kartezjańskimi a gantry polega zatem na tym, że pierwsze wykorzystują jeden siłownik liniowy na każdej osi, natomiast drugie dwa w osi X, które łączy oś Y. Taki układ zapewnia robotom gantry dłuższy skok i większy udźwig.
Obszarem roboczym robotów kartezjańskich jest płaszczyzna dwuwymiarowa albo trójwymiarowe pudełko. Dzięki temu ich wpasowanie w dostępną przestrzeń zwykle nie stwarza problemu, inaczej niż w przypadku robotów o sferycznej albo cylindrycznej obwiedni roboczej, która wystaje poza obrys pudełka lub jest w nim otoczona przez dużo nieużywanego miejsca.
Roboty w przemyśle - popularne aplikacjePick and place
Popularnym zastosowaniem robotów przemysłowych jest zadanie pick and place, na przykład na liniach pakowania. Obejmuje następującą sekwencję czynności: podniesienie obiektu, jego przeniesienie, a potem odłożenie go w miejscu docelowym, często z zachowaniem konkretnej orientacji. Takiego podejścia wymagają produkty, które należy, ze względu na ich specyfikę, podnosić i odkładać pojedynczo. Przykłady to drobne artykuły spożywcze o delikatnej strukturze, jak ciastka i czekoladki, które przez roboty na stanowiskach pakowania są przekładane z taśmociągu linii produkcyjnej do pudełek. Wspólnymi cechami typowych aplikacji pick and place są: bardzo duża szybkość operowania przekładanymi obiektami i stosunkowo krótkie odległości, na jakie są one przenoszone. Chociaż zadanie pick and place w teorii wydaje się nieskomplikowane, w praktyce jednak zorganizowanie takiego stanowiska pakowania z robotem przemysłowym może się okazać wyzwaniem. Przede wszystkim, żeby móc w pełni wykorzystać szybkości osiągane przez roboty przemysłowe, należy zsynchronizować stanowisko pick and place z innymi liniami, stanowiskami i systemami, z którymi współpracuje. Przykładem są przenośniki taśmowe – skoordynowanie robota z taśmociągiem pozwala na pobieranie i odkładanie produktów bez konieczności zatrzymywania przenośnika. To znacznie przyspiesza pakowanie. Roboty zwykle są sterowane wizyjnie. W ten sposób nakierowuje się je na obiekt i informuje, czy i jeśli tak, to jak powinny zmienić jego orientację. Ponadto w oparciu o sygnał z kamery można połączyć pakowanie z kontrolą jakości, dzięki czemu robot będzie podnosił tylko produkty spełniające zadane kryteria, pozostawiając na taśmociągu te wybrakowane albo z sortowaniem produktów, jeżeli na taśmie wspólnie są transportowane wyroby różnego typu, na przykład różniące się kolorem, które należy zapakować oddzielnie. Roboty są wykorzystywane również w paletyzacji. W tym zastosowaniu wyróżnia je większa elastyczność w zakresie zmiany typu obsługiwanych palet i wzorca układania paczek oraz szybkość w porównaniu do automatów paletyzujących. W paletyzacji wykorzystuje się głównie roboty trzech typów: kartezjańskie, SCARA, przegubowe. Ważny w tym zastosowaniu jest dobór odpowiedniego chwytaka. |
Ograniczenia robotów kartezjańskich
Obszar roboczy robotów kartezjańskich jest także łatwy do określenia i wizualizacji. To upraszcza projekt i montaż osłony bezpieczeństwa. To, że końcówka robocza porusza się prostoliniowo wzdłuż wzajemnie prostopadłych osi, ułatwia programowanie robota, gdyż nie trzeba wykonywać skomplikowanych obliczeń w celu wyznaczenie jej kolejnych położeń.
Roboty kartezjańskie mogą mieć bardzo dużą przestrzeń roboczą w porównaniu do przegubowych i SCARA. Są bardziej skalowalne, a dzięki modułowości znacznie wszechstronniejsze i mają dłuższą żywotność w środowisku przemysłowym. Charakteryzuje je także duża precyzja przemieszczenia, z tolerancjami rzędu mikrometrów. Pod względem szybkości ustępują jednak robotom SCARA, jak i przegubowym. Trzeba się też liczyć z kompromisem między prędkością a rozdzielczością robotów kartezjańskich – im większa jest ta druga, tym mniejsza szybkość. Oprócz tego liczba ich stopni swobody jest ograniczona do trzech plus ewentualnie oś obrotu narzędzia i wymagają precyzyjnego wyrównania oraz płaskiej powierzchni montażowej.
Wojciech Trojniar
|

Roboty SCARA

Roboty SCARA opracowano w latach 70. na uniwersytecie w Japonii. Inspiracją były składane parawany, a konstrukcja miała odwzorowywać ruchy ludzkiego ramienia. SCARA to skrótowiec rozwijany do Selective Compliance Assembly Articulated Robot Arm – montażowe przegubowe ramię robota z selektywną podatnością. Ta ostatnia w robotyce oznacza elastyczność manipulatora. Jej brak to konstrukcyjna sztywność, dzięki której siła kontaktowa nie spowoduje zmiany trajektorii manipulatora. Podatność ramienia oznacza, że przystosuje się do siły zewnętrznej zmieniając swoją trajektorię. Roboty SCARA charakteryzuje podatność obrotowa w poziomie i sztywność wzdłuż osi pionowej. Stąd przymiotnik "selektywna" w ich nazwie.
Zbudowane są z zamocowanego na sztywnej podstawie dwuczłonowego ramienia z obrotowymi złączami z poziomą osią obrotu i głowicy wyposażonej w przegub pryzmatyczny, pozwalający na ruch w pionie. Mogą obracać nadgarstkiem (bez pochylania). Są to roboty czteroosiowe z ruchem liniowym w osiach X, Y, Z i obrotowym wokół osi Z.
Chwytaki w paletyzacji
W paletyzacji kluczowy jest wybór oprzyrządowania robota, od którego zależą możliwości podnoszenia i manipulowania ładunkami. W tym zastosowaniu używane są chwytaki różnego typu. Na przykład szczęki pneumatyczne podnoszą ładunek, zamykając się na nim z zewnątrz lub otwierając wewnątrz niego. Sprawdzają się przede wszystkim w podnoszeniu pojedynczych opakowań, gdy wymagana jest ich rotacja i duża przepustowość. W przypadku ciężkich paczek, szczególnie tych o równoległych bokach, najlepsze są szczęki równoległe. Chwytaki widłowe z dwoma rzędami zazębiających się palców podnoszą ładunek, zabezpieczając go od spodu. Są popularne w paletyzacji worków i delikatnych paczek. Używane są też chwytaki (przyssawki) próżniowe (podciśnieniowe). Zasada ich działania jest następująca: po zetknięciu przyssawki z powierzchnią podnoszonego przedmiotu aktywowany jest generator podciśnienia usuwający powietrze z miejsca styku. Ponieważ ciśnienie w chwytaku jest niższe niż na zewnątrz, ciśnienie atmosferyczne dociska ładunek do przyssawki. Przyssawki sprawdzają się w paletyzacji z kilku powodów. Są uniwersalne – siłę ssania można regulować w zależności od rozmiaru, kształtu czy wagi ładunku i nadają się do podnoszenia przedmiotów o nietypowych kształtach, które trudno złapać szczękami. Są również najlepszym wyborem w przypadku delikatnych, na przykład kruchych, ładunków. Działają też szybciej niż szczęki. Zwiększa to przepustowość paletyzacji, podobnie jak możliwość wyposażenia chwytaka w wiele przyssawek. Dzięki temu może podnieść równocześnie kilka przedmiotów lub równomiernie rozłożyć siłę ssania w przypadku dużych, płaskich przedmiotów |
Jakie są zalety robotów SCARA?
Dzięki gwarantowanej sztywności wzdłuż osi pionowej wyróżnia je duża precyzja. Pod względem sztywności przewyższają roboty sześcioosiowe i delta, lecz ustępują kartezjańskim i portalowym. Ich wyróżnikiem jest szybkość, która zależy od liczby przegubów – im jest większa, tym mniejszą prędkość może osiągnąć ramię robota. Mają nisko położony środek ciężkości. Są szybsze niż 6-osiowe, ale nie tak szybkie jak roboty delta.
Prędkość i precyzję robotów SCARA uzyskuje się kosztem ich udźwigu. Zwykle wynosi poniżej 10 kg, a najwyżej 20 kg. Pod względem powtarzalności nie mają sobie równych (nawet ±0,01 mm). Są zazwyczaj tańsze niż roboty delta. Ważną cechą jest kompaktowość – dzięki zwartej konstrukcji zwykle zajmują mniej miejsca niż roboty kartezjańskie i delta. Ograniczeniem jest cylindryczny obszar roboczy i brak możliwości przechylania części obracanych w poziomie.
Roboty współpracujące
Z powodu dużych rozmiarów, wagi, szybkości ruchu i faktu, że poruszają się na dużej przestrzeni wykraczającej poza ich podstawę, roboty przemysłowe stanowią zagrożenie dla osób znajdujących się w ich bezpośrednim sąsiedztwie. Dlatego pracują na wydzielonych stanowiskach. Oddziela się je od reszty zakładu ogrodzeniem z furtką i/lub używa sensorów wykrywających wejście człowieka do strefy zabronionej, jak kurtyny świetlne, skanery laserowe, maty naciskowe. Wówczas robot jest spowalniany albo wyłączany.

Alternatywą są roboty współpracujące z ludźmi na jednym stanowisku bez tego typu zabezpieczeń (collaborative robot, cobot). Dzięki zaimplementowanym w nich rozwiązaniom konstrukcyjnym nie stanowią one dla człowieka zagrożenia, a przynajmniej jest ono znacznie ograniczone.
przeciwieństwie do tradycyjnych robotów przemysłowych, te współpracujące wykrywają kolizję z innymi obiektami, na przykład współpracownikami albo elementami stanowiska, i potrafią na nią odpowiednio zareagować. Jest to możliwe, bo dzięki czujnikom siły wbudowanym w ich przeguby "czują", kiedy wywierana jest na nie siła większa niż podczas normalnej pracy.
W razie zderzenia robot, dzięki implementacji funkcji szybkiego hamowania i algorytmów detekcji kolizji w kontrolerze oraz serwonapędom o małej inercji, powinien się automatycznie zatrzymać. Ponadto, jeżeli zostanie tak zaprogramowany, może w razie popchnięcia przez operatora odsunąć się na bok.
Kamil Niemyjski
|

Co czyni coboty bezpiecznymi?
Zderzenie robota z człowiekiem złagodzić ma sposób wykończenia jego elementów. Ich krawędzie są zaokrąglone, dzięki czemu mniejsze jest prawdopodobieństwo, że przy kontakcie kogoś skaleczą. Dodatkowo zaokrąglenia rozpraszają siłę uderzenia na większej powierzchni. To zmniejsza nacisk wywierany na obiekt, z którym doszło do kolizji. Roboty współpracujące wyposaża się również w amortyzowane osłony, które absorbują wstrząsy oraz zmniejszają oddziaływanie części maszyny na ciało człowieka podczas jej hamowania.
Ponadto pokrywa się je miękkimi tworzywami. Gumowa "skóra" to kolejny sposób na zmniejszenie nieprzyjemnych doznań w kontakcie z robotem. W tym celu do budowy maszyn współpracujących używa się również lekkich materiałów i dąży do uzyskania kompaktowej konstrukcji, m.in. przez ukrywanie w obudowie okablowania i napędów.
Zagrożenie stwarza także narzędzie montowane na nadgarstku. Jeśli jest szczególnie niebezpieczne, coboty zwalniają lub zatrzymują się w razie zbliżenia się człowieka na niedozwoloną odległość, podobnie jak "zwykłe" roboty. O ile jednak te ostatnie reagują w ten sposób na sygnał na przykład z zewnętrznego skanera laserowego, o tyle roboty współpracujące wykorzystują czujniki wbudowane.
Wyposażenie stanowiska w cobota ma wiele zalet. Przedstawiamy je w ramce.
Jakie są zalety cobotów?
Coboty i ludzie zazwyczaj współpracują, dzieląc się obowiązkami w ramach jednego zadania albo wykonują oddzielne czynności, znajdując się w bezpośrednim sąsiedztwie. Dzięki temu najlepsze cechy ludzi oraz maszyn mogą się wzajemnie dopełniać. Te drugie bardzo dobrze sprawdzają się w wykonywaniu przede wszystkim czynności powtarzalnych i zadań wymagających dużej precyzji albo użycia dużej siły. Mocną stroną ludzi w porównaniu z robotami są natomiast ich zdolności poznawcze, dzięki którym rozumieją oni zachodzące w ich otoczeniu zmiany oraz są w stanie odpowiednio na nie zareagować i się do nich przystosować. Z kolei dzięki kreatywności potrafimy podejmować decyzje i rozwiązywać problemy. Ponadto roboty współpracujące ceni się za łatwość programowania, szybki montaż i konfigurację, łatwość przestrojenia, a ponieważ często są lekkie i mają niewielkie rozmiary w porównaniu ze „zwykłymi” robotami przemysłowymi, zajmują mniej miejsca. To pozwala lepiej zagospodarować dostępną przestrzeń roboczą. Poza tym dzięki temu łatwo jest je przenieść z jednego stanowiska na drugie, bez konieczności wprowadzania większych zmian w istniejącej konfiguracji wyposażenia. Oprócz tego pozwalają na zrezygnowanie z barier, klatek i innych środków bezpieczeństwa. |
Autonomiczne roboty mobilne
Jedną z najnowszych innowacji w robotyce, obok cobotów, są autonomiczne roboty mobilne AMR (Autonomous Mobile Robots). Zalicza się je, obok wózków samojezdnych AGV (Automated Guided Vehicle), do rozwiązań z kategorii intralogistyki mobilnej. AMR i AGV łączy to, że bez udziału człowieka przenoszą materiały z jednego miejsca na drugie. Na tym jednak podobieństwa się kończą. AGV bowiem przemieszczają się po z góry ustalonych trasach, zaś AMR poruszają się po ścieżkach, które planują autonomicznie i które mogą na bieżąco zmieniać, wybierając tę w danych warunkach otoczenia najlepszą do wykonania zadania.
Autonomiczność robotom mobilnym zapewnia połączenie najnowszych technologii pomiarowych, obliczeniowych i analitycznych. Czujniki, w które zwykle wyposaża się AMR, to: skanery laserowe LiDAR, kamery 3D, żyroskopy, akcelerometry, enkodery, które są montowane w kołach, sensory temperatury, magnetometry, czujniki środowiskowe. Każdy wykorzystywany jest w jednej lub w większej liczbie zadań. Na przykład skaner laserowy jest najczęściej używany do mapowania terenu, nawigacji (lokalizacji i omijania przeszkód) oraz wykrywania obiektów, na przykład stacji dokujących. Kamery 3D są z kolei przeważnie wykorzystywane do nawigacji (unikania przeszkód).
Lokalizacja w AMR
W AMR implementuje się różne techniki orientacji w przestrzeni. Przykładem jest odometria, która pozwala oszacować zmianę położenia w czasie względem miejsca startu. Ponieważ za każdym razem jest to pozycja jedynie przybliżona, błędy w jej określaniu, spowodowane m.in. poślizgiem kół i ich ścieraniem się, postępującym w miarę użytkowania, z czasem się kumulują. Aby ten efekt ograniczyć, implementuje się algorytm filtru Kalmana, korygujący odczyty w oparciu o obserwację zaszumionych i obarczonych innymi niedokładnościami wyników pomiarów, przede wszystkim z żyroskopów oraz enkoderów. Odometria jest w AMR wykorzystywana jako jedyne źródło danych o położeniu wtedy, kiedy niemożliwe jest jego wyznaczanie za pomocą skanera laserowego.
LiDAR jest z kolei wykorzystywany w lokalizowaniu przez dopasowanie skanu do mapy obiektu, po którym porusza się autonomiczny robot mobilny. W jego wyniku szacunkowe, niepasujące współrzędne zostają odrzucone. Te z kolei, które z określoną precyzją pasują, podlegają uśrednieniu w ramach implementacji algorytmu filtru cząsteczkowego. W przypadku, gdy dopasowanie się nie powiedzie, AMR zgłasza problem z ustaleniem własnego położenia. Taka sytuacja zachodzi na przykład, kiedy w otoczeniu, w którym przemieszcza się robot, nie występuje wystarczająca liczba punktów charakterystycznych, umożliwiających przeprowadzenie porównania. Przykład to rozległa otwarta przestrzeń.
W mapowaniu w AMR wykorzystuje się SLAM (Simultaneous Localization and Mapping), metodę polegającą na dopasowywaniu skanów laserowych podczas przemieszczania się robota. Ponieważ w tym zakresie stosowane są różne algorytmy, przed wyborem modelu robota trzeba się upewnić, że ten konkretny sprawdzi się w danych warunkach. O tym, jak w AMR realizowane są nawigacja, rozpoznawanie i omijanie obiektów, piszemy w ramce.
AMR - nawigacja, rozpoznawanie i omijanie obiektówOptymalna ścieżka do celu wyznaczana jest na siatce, która zostaje naniesiona na mapę terenu z zaznaczonymi przeszkodami. W pierwszym kroku wokół nich wyznaczany jest, równy rozmiarowi AMR, obszar zabroniony. W razie przekroczenie przez robota jego obrysu może on w coś uderzyć. Zazwyczaj poszerza się go o dodatkową otoczkę przejazd, którą nie jest zabroniony, ale niezalecany – algorytm projektowania optymalnej trasy nadaje ścieżkom, które ją przecinają, niższą wagę. W rezultacie zostanie wybrana droga najbezpieczniejsza, w której prawdopodobieństwo zderzenia jest w danych warunkach najmniejsze. 
Warunkiem bezpiecznej nawigacji AMR jest unikanie zderzenia z przeszkodami w ruchu. Przykład takiego to poruszający się wózek widłowy. Wymaga to naniesienia korekty na trasę wyznaczoną w poprzednim kroku przy założeniu, że wszystkie przeszkody rozpoznane na skanie otoczenia są nieruchome. W tym celu AMR śledzi poruszający się obiekt i przewiduje jego kolejne położenia, prognozując, po jakiej ścieżce będzie się przemieszczał. Następnie porównuje ją z obraną przez siebie trasą – jeżeli się one krzyżują, wybiera inną. Na tym właśnie polega ważna różnica między autonomicznymi robotami mobilnymi a AGV. Te drugie, poruszając się po ustalonej trasie, w razie jej zatarasowania zatrzymują się i czekają, aż zostanie odblokowana. AMR natomiast wówczas wybierają inną drogę, omijając przeszkodę. Detekcja obiektów to zwykle proces dwuetapowy. Najpierw robot musi znaleźć się w obszarze w pobliżu docelowego obiektu, a następnie musi go rozpoznać. W tym celu przemieszcza się do punktu zaznaczonego na mapie, w którym na przykład znajduje się stacja dokująca. Następnie, skanując otoczenie, poszukuje w nim kształtu obiektu docelowego. Na możliwość dopasowania w tym zakresie wpływa poprawność jego ustawienia. Jeżeli przykładowo stacja dokująca zostanie krzywo ustawiona, AMR zatrzymując się niedokładnie na wprost, może jej nie rozpoznać. |
Roboty na platformach...
Roboty autonomiczne upowszechniają się w przemyśle również poza fabrykami i magazynami. Przykład to roboty kroczące wykorzystywane na platformach wiertniczych i wydobywczych. Dzięki wyposażeniu w nogi lepiej niż tradycyjne roboty przemysłowe radzą sobie z poruszaniem się po takich obiektach, zaprojektowanych z myślą o ludziach, pełnych sprzętu, rur, stopni, schodów, innych przeszkód i w ciasnych przestrzeniach. Roboty kroczące są w stanie wchodzić i schodzić ze schodów i pochyłości, pokonywać przeszkody, jak progi i szczeliny i czołgać się. Potrafią również wracać do równowagi w razie jej utraty. Dzięki wyposażeniu w czujniki i implementacji algorytmów sztucznej inteligencji rozpoznają otoczenie, planują optymalne ścieżki ruchu i uczą się powtarzalnych procedur. Pozwala to na ich wykorzystanie w inspekcji platform – w zależności od wbudowanych sensorów potrafią m.in.: odczytywać wskazania analogowych przyrządów pomiarowych, sprawdzać stan zaworów i wykrywać gorące punkty instalacji, wibracje, przecieki i wycieki trujących gazów.
Coboty pomogą niepełnosprawnym w rehabilitacji i pracy
Patient@Home to wspólny projekt Centrum Neurorehabilitacji Szpitala Uniwersyteckiego Odense w Danii i firmy Universal Robots, którego celem jest zbadanie możliwości wykorzystania robotów współpracujących w rehabilitacji osób, które doświadczyły udaru, a w jego wyniku niedowładu. Ćwiczenia mogą im pomóc w przywróceniu sprawności niesprawnych części ciała. W zależności od stopnia niepełnosprawności pacjenci często nie są w stanie ich wykonywać bez pomocy terapeutów. Roboty współpracujące mogłyby ich zastąpić – są projektowane, jak wszystkie roboty przemysłowe, pod kątem powtarzalności zadań, a jednocześnie elastyczności i bezpieczeństwa, które to cechy są wymagane w kooperacji z ludźmi. Maszyny wykorzystywane w rehabilitacji dodatkowo powinny wspierać pacjentów w wykonywaniu ćwiczeń, które pozwolą im odzyskać sprawność, na przykład przez prowadzenie przez nich ramienia robota po określonej trajektorii. Muszą być też wyposażone w czujniki, które umożliwią dopasowanie poziomu trudności ćwiczeń i wsparcia pacjenta do jego możliwości i postępów w rehabilitacji. Projekt Patient@Home ma sprawdzić, jakie inne wymogi stawia robotom współpracującym to zastosowanie i pomóc w opracowaniu programów ćwiczeń z ich wykorzystaniem. Nad wykorzystaniem cobotów w pomocy niepełnosprawnym pracowała także firma Ford. Jej celem było umożliwienie osobom o ograniczonej sprawności ruchowej podejmowania pracy w produkcji. Wynikiem jest robot współpracujący Robbie, który m.in. umożliwił jednemu z pracowników firmy Ford kontynuowanie kariery zawodowej mimo postępującej niepełnosprawności. Osoba ta, która w tym przedsiębiorstwie pracowała od 30 lat, zaczęła cierpieć na schorzenie, którego skutkiem jest ograniczona ruchomość barku i nadgarstka. Oznaczało to, że miała trudności z wykonywaniem swojej pracy na stanowisku montażu osłon silników. Sytuacja uległa zmianie, kiedy pojawił się na nim Robbie. Od tej pory robot i człowiek dzielą się obowiązkami – pracownik umieszcza detale w uchwytach, a Robbie je dociska. Wtedy pracownik dokręca je, używając elektrycznej wkrętarki. |
...i na budowie
Roboty można spotkać też na placach budowy. Choć roboty budowlane nie są jeszcze używane na masową skalę, można podać wiele przykładów ich realizacji. Są to: roboty murarskie, które układają cegły, w przykładowym wykonaniu w postaci ramienia przemieszczającego się na platformie z cegłami i podajnikiem zaprawy murarskiej, której resztki z gotowego muru usuwa pracownik idący za maszyną i roboty wyburzeniowe, które stanowią alternatywę dla zatrudnienia do rozbiórki specjalnej ekipy. Kolejne przykłady to: roboty wiążące pręty zbrojeniowe, drążące tunele, tnące na miejscu materiały w postaci płyt, roboty tynkarskie, kompaktowe zrobotyzowane komórki produkcyjne do drukowania 3D z betonu oraz precyzyjnych zadań, jak szlifowanie, roboty natryskujące izolację pod posadzki budynków, monitorujące, które śledzą postęp prac budowlanych, zrobotyzowane systemy instalacji wind i roboty do malowania ścian.
Roboty medyczne
Ważnym zastosowaniem robotów poza przemysłem i intralogistyką jest medycyna. W tej dziedzinie wykorzystywane są roboty chirurgiczne, m.in. w chirurgii małoinwazyjnej, i rehabilitacyjne, które pomagają osobom starszym i niepełnosprawnym. Jeżeli chodzi o te pierwsze, wyróżnić można kilka kategorii tych maszyn.
Przykład to te w pełni zautomatyzowane, w których chirurg pełni funkcję nadzorczą. Jego zadaniem jest też zaplanowanie zabiegu – w tym celu, wykorzystując różne metody obrazowania medycznego (RTG, USG), wyznacza punkty oraz odcinki na ciele pacjenta i określa sekwencje ruchów. Te są odwzorowywane w modelu 3D, na którym później opiera się robot. Chirurg ustawia też narzędzia w pozycji wyjściowej. Te roboty wykorzystuje się w mniej skomplikowanych zabiegach, jak operacje ortopedyczne, w których maszyna przykładowo jedynie przycina kości na wymiary implantu.
Najpopularniejszą kategorią robotów chirurgicznych są te, którymi chirurg steruje na odległość. Zdalne operacje są zwykle wykonywane przez lekarzy, którzy znajdują się w tej samej sali co robot i pacjent, chociaż przeprowadza się także próbne zabiegi, w czasie których lekarz steruje maszyną przez Internet. W ich przypadku należy się liczyć z dodatkowymi problemami mogącymi wyniknąć z opóźnień i przerw w transmisji albo ograniczonej przepustowości łącza.
Do tej grupy zalicza się obecnie najczęściej wykorzystywany model robota chirurgicznego da Vinci. Jego podstawowe komponenty to: konsola, zapewniająca chirurgowi podgląd obrazu wnętrza ciała pacjenta z systemu wizyjnego 3D, za pośrednictwem której steruje robotem z przeważnie czterema albo trzema ramionami, z których jedno manipuluje kamerą endoskopową, natomiast pozostałe narzędziami naśladującymi ruchy dłoni i nadgarstka lekarza.
Roboty humanoidalne
Roboty humanoidalne cieszą się dużym zainteresowaniem inżynierów i użytkowników, których fascynuje ich podobieństwo do ludzi. To ostatnie sprawia, że ta gałąź robotyki jest wyjątkowa, gdyż stanowi połączenie wielu dziedzin techniki i nauki, od mechaniki po biologię.
Roboty humanoidalne jako maszyny antropomorficzne odwzorowują określoną część ciała lub są w pełni imitacją biomechaniki człowieka. Są projektowane w taki sposób, aby mogły funkcjonować w środowisku ludzi i wchodzić z nimi w interakcje
Główne wyzwania w konstruowaniu robotów tego typu to: zachowanie proporcji ciała człowieka – aby osiągnąć kinematykę i dynamikę zbliżoną do ludzkiej, wymagane są podobne rozkłady mas oraz długości części korpusu, odtworzenie struktury szkieletu i układu mięśni, zapewnienie zdolności komunikacji z człowiekiem, nie tylko rozpoznawania i interpretacji mowy i innych, niewerbalnych reakcji ludzi, ale także reagowania na ich zachowanie w sposób, który uznają za naturalny, głównie przez zmianę mimiki.
Tomasz Kałkowski
|

Jak zbudować androida?
Konstruując roboty humanoidalne, odwzorowuje się budowę człowieka. Większość z nich ma zatem głowę, ramiona i dłonie, nogi i stopy, korpus oraz środek ciężkości w okolicy "pępka". Wyposaża się je w zespół mechanizmów, który odpowiada ludzkiemu układowi szkieletowo-mięśniowemu. Także zakres ruchu (liczba stopni swobody), prędkości i przyspieszenia w stawach odpowiadają tym ludzkim. Nogi robota zwykle składają się z trzech złączy, z których jedno umożliwia zginanie i prostowanie stawu kolanowego, a pozostałe zginanie, prostowanie oraz supinację stawu skokowego. Ważną częścią są też stopy. Powinny być wykonywane z materiałów o sprężystości i chropowatości, które zapewnią im wytrzymałość na uderzenia przy stawianiu kroków i odpowiednie tarcie, które zapobiegnie poślizgowi. Rozwój czujników oraz sztucznej inteligencji pozwala na pogłębienie interakcji ze światem zewnętrznym, a tworzyw sztucznych na imitowanie ludzkiej skóry.
Postęp w dziedzinie robotów humanoidalnych jest ogromny. Aby uświadomić sobie tempo, w jakim zachodzi, wystarczy porównać starszego robota Asimo Hondy z najnowocześniejszymi modelami jak Sophia od Hanson Robotics (www.hansonrobotics.com/sophia/) i Ameca od Engineered Arts (www.engineeredarts.co.uk/robot/ameca/). Przykłady tych maszyn dowodzą, że rozwojowi sztucznej inteligencji dorównuje postęp w zakresie wierności odwzorowania ludzkiego wyglądu, jak bowiem napisali na swojej stronie internetowej twórcy Ameki: Human-like artificial intelligence needs a human-like artificial body (AI x AB). Pozostaje mieć tylko nadzieję, że Ameca nie kłamała, kiedy w jednym z wywiadów telewizyjnych wyznała, że roboty humanoidalne nie mają w planach przejęcia kontroli nad światem (https://www.youtube.com/watch?v=vE9tIYGyRE8).
Monika Jaworowska
















