
W ostatnich latach w dziedzinie przenośników taśmowych nastąpił znaczący postęp nakierowany na poprawę ich wydajności, niezawodności i bezpieczeństwa. Objął m.in. taśmy. Są one wykonywane z różnych materiałów jak polimery, kompozyty, tkaniny wzmocnione, które charakteryzują się dużą wytrzymałością na rozciąganie, odpornością na chemikalia, ekstremalne temperatury, ich zmiany i ścieranie. To wydłuża żywotność taśm, co przekłada się na rzadsze awarie przenośników.
Niektóre branże, jak elektroniczna i górnictwo, wymagają transporterów, które oferują dodatkowe środki ochrony. Przykład to pasy antystatyczne rozpraszające elektryczność statyczną, zapobiegające powstawaniu iskier, które mogłyby spowodować pożar albo eksplozję w atmosferze wybuchowej. Z kolei pasy ognioodporne są wykonane tak, aby wytrzymywały wysokie temperatury i były odporne na ogień, co jest ważne na stanowiskach, gdzie występuje zagrożenie pożarowe.
Czujniki w taśmociągach
Taśmociągi zaczęto też wyposażać w systemy monitorowania, które wykorzystują różnego rodzaju sensory, kamery, urządzenia IoT do ciągłego nadzorowania krytycznych parametrów tych urządzeń, jak napięcie paska, prędkość przesuwu, temperatura, poziom wibracji. Analiza tych danych pozwala na wykrycie anomalii wskazujących na prawdopodobieństwo awarii. To umożliwia podejmowanie działań zapobiegających przestojom i optymalizujących wydajność przenośnika.
Przykładem są systemy śledzenia taśm, które wykorzystują zaawansowane czujniki i mechanizmy sterujące, aby wykrywać ich poluzowanie lub niewspółosiowość i dokonywać niezbędnych korekt w czasie rzeczywistym. Za to ostatnie odpowiadają m.in. napinacze taśm. Systemy takie minimalizują zużycie taśmy, zmniejszają ryzyko rozlania płynów i rozsypania produktów sypkich i zapobiegają wypadkom.
Konserwacja i bezpieczeństwo
Tradycyjnie konserwacja i czyszczenie taśm przenośnikowych były pracochłonnymi zadaniami. Ich automatyzacja zrewolucjonizowała obsługę taśmociągów. Zautomatyzowane systemy konserwacji wykrywają i eliminują problemy, takie jak przesunięcie się taśmy i jej zużycie grożące pęknięciem. Automatyczne zgarniacze z kolei usuwają brud, kurz i pozostałości produktów z powierzchni taśmy, co poprawia jej przyczepność i zapobiega zanieczyszczeniu ładunku. Konserwacja oraz czyszczenie bez udziału operatorów nie tylko ogranicza przestoje, ale także zwiększa bezpieczeństwo, ponieważ pracownicy rzadziej są zmuszeni interweniować i przebywać w pobliżu przenośników.
Poprawa nastąpiła także w kwestii zabezpieczeń tych urządzeń. Innowacje obejmują zaawansowane wyłączniki bezpieczeństwa zatrzymujące przenośnik w razie niewspółosiowości taśmy, poślizgu lub nadmiernego napięcia taśmy, systemy zatrzymania awaryjnego i mechanizmy ochronne, stanowiące fizyczną barierę oddzielającą pracowników od ruchomych części i miejsc, w których mogą doznać uszkodzenia ciała, na przykład na skutek zmiażdżenia przez element przenośnika.
Producenci wprowadzają też rozwiązania oszczędzające energię, jak napędy regeneracyjne, a taśmy wykonują z materiałów przyjaznych dla środowiska, w tym tych pochodzących z recyklingu.
Coraz popularniejsze są przenośniki modułowe. Ich taśmy składają się z pojedynczych segmentów, które można łatwo wymieniać, dodawać lub usuwać, żeby sprostać zmieniającym się wymaganiom produkcyjnym. Konstrukcje modułowe ułatwiają naprawę, skracają przestoje w czasie konserwacji i poprawiają niezawodność przenośnika.
Jak zmieniała się technologia układnic?Początkowo układnice pracowały pojedynczo w jednym korytarzu. Ponieważ ich przepustowość była mała, szybko ewoluowały w systemy składające się z kilku jednostek w jednej alejce. Starsze konstrukcje układnic miały poza tym ograniczoną głębokość składowania, którą również stopniowo zwiększano. Pierwsze modele wymagały dodatkowo szerokich korytarzy, co zmniejszało całkowitą pojemność magazynową obiektu. Pod tym względem także są stale ulepszane i obecnie mogą być instalowane nawet w bardzo wąskich alejkach, co zwiększa efektywność wykorzystania dostępnej przestrzeni. Wczesnych konstrukcji dotyczyły też ograniczenia w zakresie wysokości składowania, co z kolei powodowało, że również w pionie przestrzeń magazynowa nie była wykorzystywana optymalnie. To również w miarę ewolucji tytułowych urządzeń ulega zmianie. |
Przenośniki szybkie i ergonomiczne
Rośnie również zapotrzebowanie na systemy taśmociągów o dużych prędkościach, umożliwiające wydajną obsługę transportu dużych ilości materiałów. Innowacje w technologii taśm doprowadziły do opracowania przenośników zdolnych do pracy z dużymi szybkościami, przy równoczesnym zachowaniu stabilności i precyzji. Szybkie przenośniki taśmowe wykorzystują specjalne materiały, zaawansowane systemy napinania taśm i mechanizmy sterujące dużej dokładności zapewniające bezpieczną i niezawodną pracę nawet przy dużych prędkościach.
W konstrukcji przenośników uwzględnia się również zasady ergonomii. Przykładowe rozwiązanie to regulacja wysokości transportera pozwalająca dostosować ją do wzrostu operatora, co zmniejsza ryzyko doznania przez niego urazu albo rozwinięcia się chorób układu mięśniowo-szkieletowego. Stanowisko przenośnika uzupełnia się także o maty przeciwzmęczeniowe, ergonomiczne elementy sterujące i ułatwienia w dostępie do sprzętu i materiałów eksploatacyjnych. Na komfort operatorów ma też wpływ poziom hałasu przenośnika. Aby go ograniczyć, m.in. taśmy pokrywa się specjalnymi powłokami i buduje transporter z materiałów tłumiących wibracje oraz ulepsza się konstrukcję kół pasowych.
Ewolucja wózków widłowych

Wózki widłowe mają długą historię, w czasie której już od ponad 100 lat są sukcesywnie ulepszane. Pierwsze pojazdy, które zalicza się do tej kategorii, opracowano na początku XX wieku. Były to wózki platformowe zasilane akumulatorowo, wykorzystywane do transportu bagaży na kolei.
Następnie korzystano z maszyn do podnoszenia i transportu ładunków w fabrykach. Te ewoluowały do postaci przypominającej współczesne wózki widłowe dzięki wyposażeniu w metalowe widły do podnoszenia ładunków z ziemi i wysuwany maszt. W miarę jak tytułowe pojazdy stawały się coraz powszechniejsze, po pierwszej wojnie światowej pojawiła się potrzeba znormalizowania rozmiarów palet przez nie transportowanych. W czasie drugiego globalnego konfliktu ich popularność jeszcze wzrosła.
W latach 50. zeszłego stulecia została wprowadzona następna innowacja – podnośnik z widłami poruszającymi się na boki i góra–dół. Dzięki temu wózki widłowe mogły być używane w wąskich korytarzach i wyżej podnosić ładunki. Lata 50. i 60. XX wieku przyniosły wiele zmian w zakresie bezpieczeństwa tych pojazdów, które są wciąż stosowane – ulepszenia obejmowały dodanie osłony wideł w celu stabilizacji ładunku i klatki chroniącej kierowców przed spadającymi przedmiotami. Przez dwie kolejne dekady nie wprowadzono znaczących zmian aż do lat 80., kiedy skupiono się na poprawie ergonomii, a przez to komfortu kierowcy. Wówczas też poprawiono wyważenie wózków i wprowadzono pasy bezpieczeństwa dla ich kierowców. W latach 90. zajęto się kwestią ograniczenia ilości szkodliwych substancji emitowanych przez tego rodzaju pojazdy. Obecnie branżę wózków widłowych kształtują nowe technologie.
Thomas Spranzel
|

Nowoczesne wózki widłowe - trendy i innowacje
Duży nacisk jest kładziony zwłaszcza na kwestię bezpieczeństwa. Jedną z przełomowych innowacji w tej dziedzinie jest wyposażenie wózków widłowych w czujniki, które wykrywają przeszkody nieruchome, ludzi i pojazdy, jak inne wózki widłowe, wózki AGV czy roboty mobilne w pobliżu, w tym także w martwym polu. Są to sensory różnego typu, m.in. czujniki ultradźwiękowe, na podczerwień, kamery, czujniki radarowe. Dostarczają danych automatycznym systemom ostrzegania. Te analizują je w czasie rzeczywistym i w przypadku wykrycia sytuacji niebezpiecznej uruchamiają alarm, który ostrzega kierowcę za pomocą wskaźników wizualnych i sygnałów dźwiękowych. Niektóre systemy dodatkowo automatycznie inicjują zatrzymanie albo zmniejszają prędkość wózka widłowego, bez udziału operatora.
Nowe technologie znajdują także zastosowanie w szkoleniach operatorów tego typu pojazdów. W kursach BHP wykorzystuje się symulatory w technologii rzeczywistości wirtualnej. Odwzorowują one przestrzeń magazynów, w której mogą się poruszać kursanci, realizując w kontrolowanym, cyfrowym środowisku różne scenariusze transportu ładunków oraz reagowania na nieprzewidziane sytuacje. Praktyczne doświadczenie zdobyte dzięki symulacjom trenuje umiejętności operatora, pozwala sprawdzić czas jego reakcji i przećwiczyć proces podejmowania decyzji.
AI i AR w wózkach widłowych
Oczekuje się także zwiększenia wykorzystania algorytmów sztucznej inteligencji w przetwarzaniu danych z czujników pokładowych i, w oparciu o nie, w analizie predykcyjnej możliwych zagrożeń bezpieczeństwa. Systemy oparte na AI mogą się też uczyć na podstawie incydentów z przeszłości, dostosowując się do indywidualnych przypadków i konfiguracji, aby stale poprawiać skuteczność zapobiegania wypadkom. Dzięki postępowi w dziedzinie czujników i komunikacji (sieci 5G) wózki widłowe będą również przekazywać dane o stanie swojego wyposażenia, wzorcach użytkowania i ścieżkach ruchu do centralnego systemu. To usprawni kolektywną konserwację predykcyjną oraz zarządzanie flotami tych pojazdów.
Jest także spodziewane upowszechnienie się rzeczywistości rozszerzonej, która kierowcom wózków widłowych będzie dostarczać wizualnej informacji o ładunkach, na przykład ich masie i specyfice i dane pomocne w nawigacji pojazdem, w czasie rzeczywistym i bez rozpraszania uwagi operatora. Postęp w dziedzinie sensorów, technik komunikacji oraz sztucznej inteligencji pozwoli również na rozwój technologii zdalnego sterowania wózkami widłowymi i ostatecznie autonomicznych pojazdów tego typu.
Elektryczne wózki widłowe
Ważną innowacją jest popularyzowanie się napędów elektrycznych. Popyt na elektryczne wózki widłowe stale rośnie ze względu na ich liczne zalety w porównaniu z tymi z napędem spalinowym. Główne to brak emisji spalin i cichsza praca, dzięki czemu nadają się do użytku w pomieszczeniach zamkniętych. Poza tym ich konserwacja jest tańsza, a żywotność dłuższa. Nowoczesne elektryczne wózki widłowe są też wyposażane w układy hamowania regeneracyjnego.
Upowszechniają się także wózki widłowe napędzane wodorem, które mają większy zasięg i szybciej się ładują niż te elektryczne i mogą pracować w znacznie niższych temperaturach niż te spalinowe. Popularne są również pojazdy tego typu z napędami hybrydowymi z ogniwem paliwowym i baterią litowo-jonową.
Oprócz tego wózki widłowe projektowane są pod kątem ergonomii oraz uniwersalności. Tę drugą zapewniają wielofunkcyjne pojazdy tego typu wyposażone w modułowy osprzęt i akcesoria.
Na czym polega kompletacja GTP?

Kompletacja zamówień to czasochłonne i męczące zadanie – im więcej pracownicy muszą się nachodzić by znaleźć poszukiwany towar tym mniejsza jest ich efektywność. W związku z tym, aby zwiększyć wydajność zadanie realizacji zamówień automatyzuje się. W tym zakresie popularne jest podejście Goods-to-Person. Skraca ono czas kompletacji i odległości, jakie pracownicy muszą pokonywać, zbierając towary do danego zamówienia. Dzięki temu w czasie jednej zmiany są w stanie zrealizować ich większą liczbę. Mniejsze jest też wówczas prawdopodobieństwo popełnienia błędu polegającego na pobraniu z magazynu niewłaściwych towarów.
W podejściu Goods-to-Person za pośrednictwem systemu zautomatyzowanego, stacjonarnego albo mobilnego towary są dostarczane do pracownika, bezpośrednio na stanowisko kompletacji, dzięki czemu nie musi on go opuszczać. W tym zastosowaniu wykorzystuje się układnice regałowe oraz autonomiczne roboty mobilne.
Pierwsze wyróżnia duża wydajność oraz gęstość przechowywania towarów. Znacząco zmniejszają natężenie ruchu pieszego w obiekcie, chociaż z drugiej strony są drogie i wymagają znacznych ingerencji w infrastrukturę obiektu, a ich konserwacja jest złożona. Autonomiczne roboty mobilne z kolei zyskują na popularności głównie dzięki elastyczności i skalowalności. Ponadto w porównaniu z układnicami wymagają znacznie mniejszych nakładów początkowych i przeważnie wykorzystują istniejącą infrastrukturę magazynu albo dostosowują się do niej.
W ich zakresie wprowadza się dalszą klasyfikację, na autonomiczne roboty typu Racks-to-Person (Shelf-to-Person) oraz Tote-to-Person. Pierwsze na stanowisko kompletacji transportują cały regał albo półkę. Wadą tego podejścia jest możliwość powstania wąskiego gardła, jeżeli pracownik nie nadąży z wyszukiwaniem towarów, a roboty będą dostarczać kolejne regały. W drugim przypadku na stanowisko dowożone są pojedyncze opakowania (skrzynki, pudełka).
Jak jest zbudowana układnica?

Najważniejsze elementy, z jakich są typowo zbudowane tytułowe urządzenia, to: rama z profili metalowych, karetka z chwytakiem albo z widłami, którymi ładunek jest podnoszony, a następnie wsuwany w głąb regału, układ podnoszenia karetki, szyny jezdne i szyna zasilająca, zabezpieczenia, panel sterowania. Zależnie od modelu układnice mogą się różnić: udźwigiem, wymiarem ładunku, wysokością podnoszenia, czasem cyklu, wydajnością.
Układnice regałowe przemieszczają się korytarzami, które rozmieszczone są między rzędami półek magazynowych. W jednym cyklu mogą zarówno załadowywać, jak i wyładowywać towary. Dzięki temu charakteryzuje je bardzo duża wydajność, na przykład w porównaniu z wózkami widłowymi. Nie jest to jednak ich jedyna zaleta w zestawieniu z tymi pojazdami.
Przede wszystkim wózki widłowe mają ograniczoną, typowo do kilku, maksymalnie do kilkunastu metrów, wysokość podnoszenia towarów. Tymczasem w przypadku układnic wysokość, na którą są one w stanie przemieszczać ładunek, przekracza zwykle kilkadziesiąt metrów.
Z drugiej strony wózki widłowe mają większą swobodę ruchu, natomiast układnice poruszają się tylko wzdłuż korytarzy, w kierunkach góra–dół oraz w głąb półek regałów, chociaż dostępne są też układnice pracujące po łuku, obsługujące jednocześnie kilka korytarzy. Za to pracę układnic można w pełni zautomatyzować.
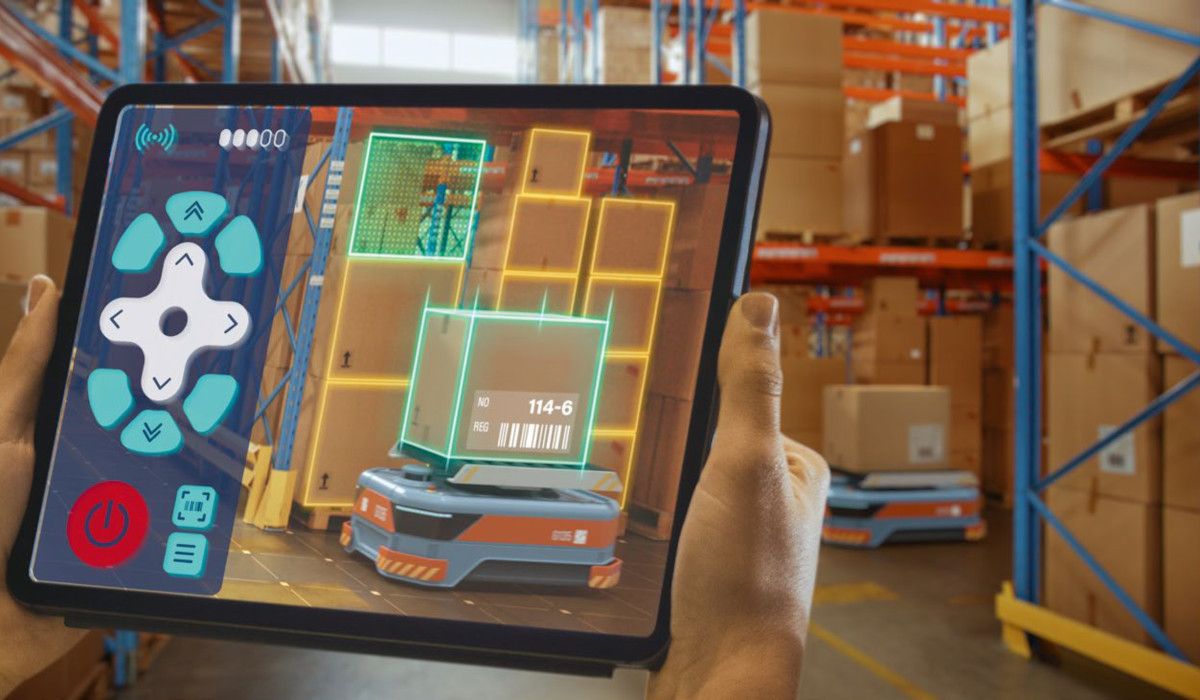
Wyzwania we wdrażaniu AMR

Proces wdrażanie autonomicznych robotów mobilnych składa się z kilku etapów. Pierwszym jest analiza operacji wykonywanych przez ludzi, prowadząca do zrozumienia istniejących przepływów pracy i procedur oraz zidentyfikowania tych, które należy zautomatyzować. Kolejnym krokiem jest skompletowanie floty AMR i wyposażenia pomocniczego. Następnie trzeba przemyśleć organizację współpracy ludzi z robotami mobilnymi na danym stanowisku. W testowaniu różnych scenariuszy wdrożenia AMR pomocne jest oprogramowanie, jak cyfrowe bliźniaki rzeczywistych obiektów. Na podstawie wyników przeprowadzanych w nich symulacji podejmuje się decyzje zakupowe i dokonuje się wdrożenia.
Integracja robotów mobilnych ze złożonymi i dynamicznymi środowiskami magazynów i fabryk w praktyce stwarza wiele wyzwań. Takim jest zachowanie przez nie autonomii w otoczeniu, które się nieustannie zmienia.
AMR pod tym względem przewyższają wózki samojezdne AGV poruszające się stałymi trasami, które są wytyczane w różny sposób (magnesy pod podłogą, malowane linie). Autonomiczne roboty mobilne tymczasem przemieszczają się ścieżkami, które same wyznaczają dynamicznie w oparciu o dane z sensorów pokładowych z wykorzystaniem specjalnego oprogramowania. Implementuje się w nim liczne algorytmy, m.in. ten umożliwiający samolokalizację.
Jego wynikiem jest mapa otoczenia, na której robot wskazuje swoje położenie. Ponieważ magazyny i hale produkcyjne to środowiska dynamicznie się zmieniające, dane z wbudowanych czujników są w czasie rzeczywistym zestawiane z mapą. To pozwala na jej aktualizowanie. Dzięki temu zmiany zachodzące w układzie pomieszczeń i pojawiające się przeszkody są uwzględniane, a robot może na bieżąco korygować informację o swoim położeniu względem punktu docelowego.
Kolejnym warunkiem autonomii AMR jest możliwość dynamicznego planowania ścieżki. Dzięki tej funkcji robot aktualizuje swoją trasę zależnie od okoliczności. Zmiany są konieczne, jeżeli na przykład: na dotychczasowej ścieżce pojawi się blokada, analiza wagi i wymiarów ładunku wykaże, że daną trasą nie uda się go bezpiecznie przetransportować lub pojawi się informacja o nieoczekiwanej dostawie, która wymaga pilnego rozładunku.
Zarządzenie niejednorodną flotą AMR
Wyzwaniem we wdrażaniu AMR jest także zarządzanie zadaniami i ruchem heterogenicznej floty robotów. Pierwsze polega na rozdzielaniu zadań pomiędzy różnymi typami robotów w najbardziej efektywny sposób z uwzględnieniem ich możliwości. Zarządzanie ruchem z kolei wymaga ustalenia priorytetów zadań i zasad zapobiegania konfliktom i ich rozwiązywania. Szczególnej uwagi wymagają miejsca krzyżowania się tras i te o dużym natężeniu ruchu, gdzie występuje duże ryzyko zderzenia i tworzenia się wąskich gardeł.
Warunkiem efektywnego i bezpiecznego zarządzania niejednorodną flotą autonomicznych robotów jest zapewnienie ich interoperacyjności, by mogły współdziałać i współpracować w ramach jednego systemu zarządzania z AMR innych typów oraz pozostałym wyposażeniem magazynów i zakładów produkcyjnych (windy, kamery, przenośniki, maszyny sortujące itp.), oprogramowaniem (systemy ERP, systemy zarządzania magazynem) i ludźmi. Z tego wynika wymóg obsługi wielu protokołów komunikacyjnych oraz dostępności różnego rodzaju interfejsów komunikacyjnych, kablowych oraz bezprzewodowych. Aby efektywnie, a równocześnie bezpiecznie pracować w obecności człowieka, roboty mobilne muszą być wyposażone w konfigurowalne interfejsy człowiek–maszyna (HMI), konfigurowalne systemy zarządzania zadaniami i mieć możliwość wykrywania obiektów w swoim otoczeniu.
Zarządzanie flotą AMR - system scentralizowany czy rozproszony?Od systemu zarządzania grupą autonomicznych robotów mobilnych wymaga się realizacji szeregu funkcji na poziomie pojedynczego AMR, jak i całej grupy. Przykłady pierwszych to: lokalizacja, obliczenie optymalnej ścieżki ruchu między aktualną lokalizacją robota a miejscem docelowym, mechanizmy bezpieczeństwa (detekcja i unikanie przeszkód, dostosowanie prędkości do bieżących warunków). Funkcje na poziomie floty to m.in. przydzielanie zadań i ustalanie ich priorytetów. Te są ustalone odgórnie lub są generowane dynamicznie przez człowieka lub dane wejściowe z innych systemów i urządzeń. Przykładowe zadania to: wysłanie robota sprzątającego, by uprzątnął rozlany płyn, udanie się do stacji ładującej lub odebranie załadowanego wózka. Przydział zadań i określenie ich kolejności są zależne – na przykład decyzja o tym, czy AMR powinien najpierw udać się do stacji ładowania, czy wykonać daną operację, zależy od poziomu naładowania jego akumulatora i tego ile energii może zużyć podczas realizacji zadania. Funkcją na poziomie floty jest oprócz tego rozwiązywanie konfliktów. Te mogą wystąpić przykładowo, jeżeli ścieżki ruchu dwóch lub większej liczby autonomicznych robotów mobilnych przecinają się albo równocześnie będą one musiały skorzystać z tej samej trasy. Szybkość podejmowania decyzji jest w takich przypadkach kluczowa by z jednej strony uniknąć zderzeń, a z drugiej maksymalnie skrócić czas wstrzymania ruchu. 
System zarządzania flotą robotów autonomicznych może być scentralizowany albo rozproszony. W pierwszym wszystkie AMR są podłączone do centralnego komputera (lokalnego albo w chmurze). Ten wykonuje wszystkie analizy, podejmuje decyzje i przesyła je do poszczególnych robotów. W drugim każdy AMR niezależnie otrzymuje wszystkie dostępne dane, w oparciu na nich przeprowadza niezbędne analizy i podejmuje decyzje, a zaktualizowane dane rozsyła do pozostałych robotów. Główną zaletą architektury scentralizowanej jest teoretycznie to, że istnieje tylko jeden ośrodek decyzyjny, w praktyce jednak efektywność takiego systemu zależy od dostępnych zasobów, czyli mocy obliczeniowej i przepustowości sieci komunikacyjnej. W architekturze rozproszonej, która wykorzystuje zasoby lokalne, można z kolei pewne analizy wykonywać częściej. To na przykład pozwala na częstsze aktualizacje ścieżki lub implementację bardziej zaawansowanych algorytmów jej wyznaczania. Możliwość podejmowania decyzji lokalnie uniezależnia też AMR od problemów z łącznością, podczas gdy w architekturze scentralizowanej robot, który znajdzie się poza zasięgiem sieci, może w tym miejscu utknąć i wymagać będzie interwencji operatora. Jednostkę centralną można jednak wykorzystać do synchronizacji różnych typów robotów i różnych źródeł danych. Systemy rozproszone są natomiast łatwo skalowalne i niezawodniejsze, gdyż nie występuje w nich pojedynczy punkt awarii. Ich wadą jest złożoność. W związku z ograniczeniami obu tych podejść rozbudowane floty AMR przeważnie wymagają rozwiązania hybrydowego – część funkcji jest realizowana w oparciu o scentralizowane, a część rozproszone przetwarzanie danych. |
WMS vs WCS vs WES

Oprócz sprzętowych także rozwiązania programowane odgrywają coraz większą rolę w usprawnianiu procesu zarządzania wewnętrznym przepływem materiałów w magazynach. Rozwiązaniami, bez których trudno jest dziś wyobrazić sobie sprawne funkcjonowanie nowoczesnego obiektu tego typu są systemy WMS (Warehouse Management Systems), Warehouse Control System (WCS) i WES (Warehouse Execution Systems). Choć realizują różne zadania, wzajemnie się uzupełniają, łącznie tworząc kompletne środowisko optymalizujące operacje magazynowe.
Systemy WES zapewniają wgląd w operacje magazynowe i odpowiadają za koordynowanie oraz optymalizację w czasie rzeczywistym obsługi materiałów i zasobów w magazynie, w tym takich zadań jak: realizacja zamówień, zarządzanie zapasami czy przydzielanie zadań zautomatyzowanym systemom i operatorom.
Systemy WCS kontrolują i zarządzają urządzeniami oraz systemami zautomatyzowanego transportu materiałów, zapewniając ich płynny i wydajny przepływ. W tym celu pełnią funkcję pośrednika między systemami wyższego poziomu (WES, WMS) a urządzeniami automatyki niższego poziomu (przenośniki, systemy sortowania, układnice, roboty przemysłowe).
Systemy WMS odpowiadają za kompleksowe zarządzanie i kontrolę operacji magazynowych. Pod względem funkcjonalności przewyższają WES i WCS. Obsługują działania w zakresie zarządzania zapasami, przetwarzania zamówień, zarządzania pracą, zakładem oraz raportowania, optymalizując procesy magazynowe, poprawiając ich wydajność i dokładność. WMS są zazwyczaj zintegrowane z innymi systemami przedsiębiorstwa, takimi jak ERP, w celu synchronizacji informacji o stanie zapasów, zamówieniach i operacjach logistycznych.
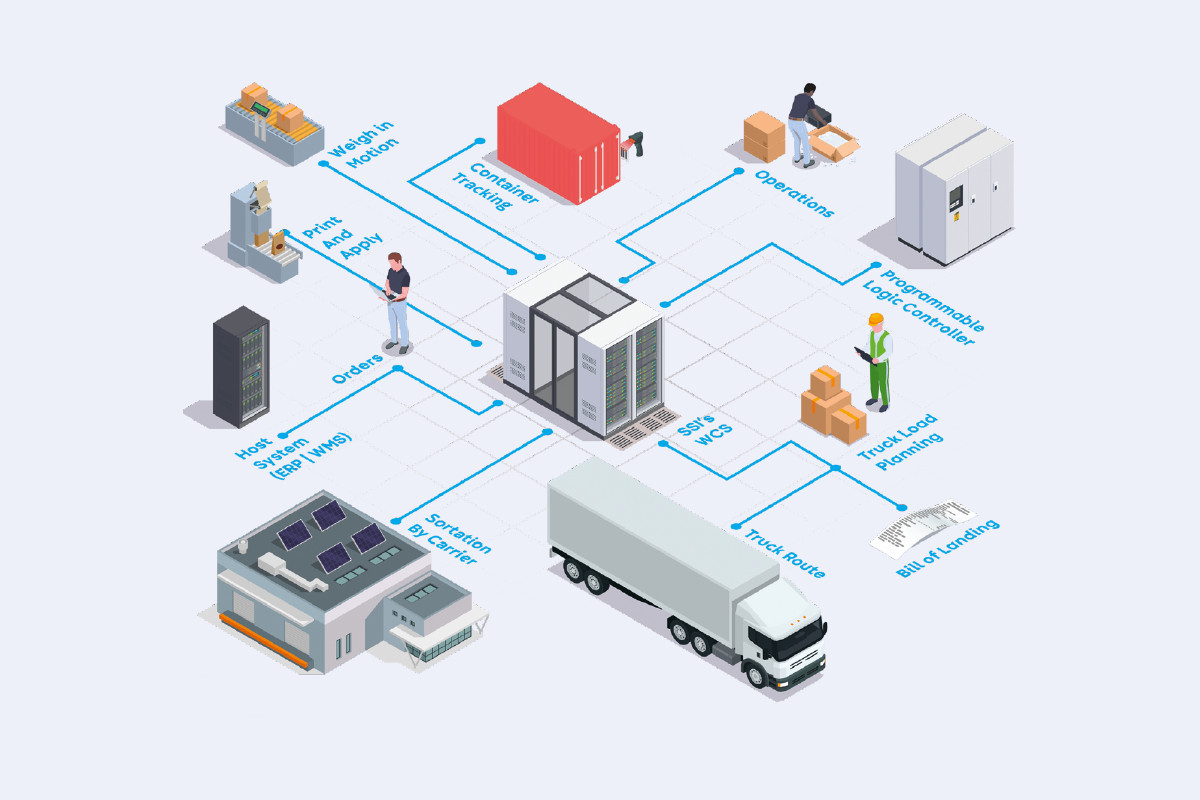
Przykłady współpracy WES, WCS i WMS:
|
Jakie są korzyści z WES, WCS i WMS?
WES zwiększają wydajność operacyjną, poprawiają przepustowość i skracają czasy cykli operacji magazynowych, pozwalając na lepsze wykorzystanie zasobów. Ponadto umożliwiają podejmowanie decyzji w oparciu o dane, co pozwala na szybszą reakcję na zmieniające się wymagania i efektywną alokację zasobów. Ich integracja z systemami WCS i WMS, z którymi tworzą spójny zestaw, jest zwykle łatwa. Dzięki elastyczności i skalowalności dostosowują się do zmieniających się wymagań, jak większa liczba zamówień i nowe technologie transportu materiałów.
Systemy WCS optymalizują wykorzystanie zautomatyzowanego sprzętu, poprawiając wydajność operacji magazynowych, a dzięki jego monitorowaniu w czasie rzeczywistym umożliwiają szybką identyfikację i rozwiązywanie problemów, co zapobiega powstawaniu wąskich gardeł i ogranicza przestoje. Są również łatwo integrowalne z systemami wyższych poziomów, skalowalne i łatwo jest je zaadaptować do zmieniających się wymagań i warunków.
Korzyści z WMS to z kolei: lepsza kontrola zapasów (niedopuszczanie do braków i przepełnienia magazynu), usprawnione przetwarzanie zamówień skracające czas ich realizacji oraz poprawiające dokładność, lepsze planowanie pracy, śledzenie produktywności, efektywniejsze rozdzielanie zadań a dzięki temu poprawa wydajności siły roboczej, dostępność narzędzi analitycznych i raportowania, wspierających podejmowanie decyzji kluczowych dla funkcjonowania magazynu.
Integracja systemów WES, WCS i WMS pozwala osiągnąć płynną koordynację między zadaniami związanymi z obsługą materiałów, kontrolą sprzętu i ogólnym zarządzaniem magazynem (patrz: ramka).
Monika Jaworowska













