
Opakowanie pełni szereg funkcji. Jego podstawowym zadaniem jest ochrona produktu – zapobiega jego uszkodzeniu i zanieczyszczeniu podczas transportu i magazynowania. Uniemożliwia też jego uwolnienie do otoczenia, na przykład rozsypanie się albo wycieknięcie. Substancje płynne i sypkie dzięki opakowaniu zyskują formą przestrzenną. Jego stan jest ponadto gwarancją nienaruszalności produktu. Umieszcza się na nim informacje o zawartości, jak skład i data przydatności do spożycia w przypadku żywności. Może być także wyróżnikiem na tle oferty konkurencji. Opakowania poza tym grupują produkty.
Opakowania jednostkowe, zbiorcze, transportowe
Wyróżnia się trzy typy opakowań. Jednostkowe mają bezpośredni kontakt z produktem. Ich funkcją jest jego ochrona i konserwacja właściwości. Ułatwiają konsumentom korzystanie z ich zawartości. Przykładami opakowań jednostkowych są: kartony z mlekiem, puszki z piwem, plastikowe butelki wypełnione detergentem.

Zbiorcze grupują pewną liczbę produktów w celu utworzenia jednostki magazynowej. Zapewniają też dodatkową ochronę, pomagając zachować integralność opakowania jednostkowego i ułatwiają korzystanie z mniejszych produktów, łącząc je w jedną paczkę. Przykładami są: kartonowe pudełka, w które po kilka pakowane są plastikowe woreczki z kaszą albo ryżem i zgrzewki butelek wody mineralnej opakowanych w folię termokurczliwą.
Trzeci typ grupuje większą liczbę jednostek magazynowych, by umożliwić ich transport. Kluczowe w tym przypadku są: gęstość upakowania i stabilność ładunku, które decydują o tym, czy dostępna przestrzeń magazynowa jest wykorzystana optymalnie, a towary są przechowywane bezpiecznie. Przykładem są palety załadowane owiniętymi folią stretch pudłami kartonowymi z butelkami wina.
Dan Rossek
|

Pakowanie jednostkowe w pakowarkach
Do umieszczania produktów w opakowaniach jednostkowych służą m.in. pakowarki. Są to zwykle zautomatyzowane maszyny, chociaż dostępne są wersje półautomatyczne. Wykorzystują folię do uformowania torebki przez zgrzewanie jej boków, wypełniają ją produktem, na koniec zamykając przez zgrzanie brzegów. Pakowarki mają wiele zalet. Zapewniają szybkie i tanie pakowanie, gdyż w obrębie jednego stanowiska automatyzują wiele zadań: formowanie opakowania, jego napełnianie i zamykanie. Wyróżnia je elastyczność – pozwalają na pakowanie produktów stałych, płynnych i sypkich. Na opakowaniach, które wykonują, jest dużo miejsca na nadruk.

Popularne typy to pakowarki poziome i pionowe. Ich główne komponenty to: rolka z nawiniętym materiałem opakowania, układ prowadnic, którymi jest on rozwijany i prowadzony do kołnierza formującego torebkę, wsyp produktu, zgrzewarka. Torebki wytworzone w pakowarkach zazwyczaj mają trzy szwy: biegnący wzdłuż, który powstaje przez złączenie, zazwyczaj na zakładkę, brzegów folii, dolny, który zamyka spód torby oraz górny, uszczelniający ją od góry. Główna różnica między pakowarkami poziomymi i pionowymi dotyczy sposobu organizacji przestrzennej – w pierwszych sekcje maszyny są rozciągnięte horyzontalnie, w drugich wertykalnie. Dlatego pakowarki pionowe zajmują zwykle mniej miejsca, dzięki czemu można dostępną przestrzeń wykorzystać efektywniej.
Czujniki oraz sterowanie pakowarkami
Pakowarki wyposaża się w liczne czujniki i systemy sterowania. Przykładem są sensory ultradźwiękowe używane do bezkontaktowego pomiaru średnicy beli materiału, na przykład folii, nawiniętego na rolkę, z której jest stopniowo odwijany, gdy formowane są kolejne opakowania. Kiedy promień beli jest znany, sterownik maszyny oblicza, ile jeszcze folii zostało, a gdy jest jej zbyt mało, sygnalizuje operatorowi, że powinien uzupełnić podajnik.
Czujniki ultradźwiękowe są także używane w pomiarach ustawienia napinacza folii, który reguluje stopień naciągnięcia jej wstęgi. Na ich podstawie sterownik maszyny decyduje, czy należy zwolnić, czy raczej powinno się przyspieszyć obroty rolki, która odwija folię.
Kolejny przykład to sensory wykrywające znaczniki na materiale rozmieszczane w odległościach równych długości kolejnych torebek. Odczytując je, sterownik maszyny w odpowiednim momencie wysyła sygnały
wyzwalające do obcinarki odcinającej kawałki materiału i zgrzewarki, która łączy jego brzegi. W tym zastosowaniu wykorzystuje się czujniki optyczne.
W zakresie sterowania pakowarkami kluczowe znaczenie dla jakości i wydajności pakowania ma synchronizacja zadań formowania opakowania i jego napełniania. W tym celu część pakowarki odpowiedzialna za uwalnianie/dozowanie produktu musi we właściwym momencie odebrać sygnał wyzwalający albo odwrotnie – kiedy napełni opakowanie, powinna taki sygnał wysłać do części pakowarki formującej kolejne. Przeważnie stosuje się pierwsze podejście, synchronizując dozownik z pakowarką. Jeżeli zgrzewane opakowania są wkładane do pudełek, nadrzędną funkcję w obrębie linii pakowania składającej się w takim przypadku z pakowarki pionowej i automatu składającego, wypełniającego oraz zaklejającego kartony, pełni zazwyczaj ten ostatni.
Wyzwania w pakowaniu w kartony

Opakowaniem jednostkowym mogą być także pudełka kartonowe. Przykładowa linia pakowania w kartony może się składać z: składarki kartonów, zaklejarki łączącej dolne klapki pudełek, maszyny wkładającej produkty do kartonów i zaklejarki górnych klapek. W takim ciągu technologicznym w pierwszym kroku kartony są pobierane z podajnika i składane. Następnie, po zamknięciu dolnych klap, są wypełniane produktem. Na koniec pudełka zamyka się od góry i transportuje na stanowisko paletyzowania. Gdy brzegi kartonów są sklejane, etapem pośrednim jest jeszcze aplikacja kleju.
Karton jest specyficznym rodzajem opakowania, łatwym do zarysowania i rozdarcia. Podatność na uszkodzenia zależy od jego jakości. Tańszy, ale gorszej jakości może, mimo oszczędności przy zakupie, być źródłem dużych strat, jeśli przez niezgodność ze specyfikacją, na przykład grubości, będzie blokować albo spowalniać maszynę kartonującą. Może też być powodem nieszczelności opakowań, co w przypadku płynnych i sypkich towarów zanieczyszcza linię produkcyjną oraz prowadzi do strat produktu. Poza tym jakość opakowań finalnych jest zwykle wtedy niezadowalająca, co, jeżeli tak zapakowane produkty trafią do sprzedaży, negatywnie przekłada się na decyzje zakupowe konsumentów.

By uniknąć problemów podczas kartonowania, ważne jest też, by przechowywać materiał opakowań w odpowiednich warunkach. Wynika to z właściwości papieru, który wchłania albo oddaje wilgoć w zależności od wilgotności w otoczeniu. Dlatego zimą, w ogrzewanym magazynie, w którym jest zbyt sucho, składowane kartony zaczną wysychać. Latem z kolei, jeżeli jest bardzo parnie, ulegną zawilgoceniu. Skutkiem jest różna sztywność suchych i mokrych kartonów, co może powodować problemy w działaniu maszyny je składającej.
Poza jakością materiału kluczowe znaczenie w procesie kartonowania ma jakość spoiwa i sposób jego nakładania. Przeważnie w tym zastosowaniu używa się kleju topliwego w postaci granulek, który jest topiony, a potem natryskiwany na karton. W zakresie aplikacji spoiwa trzeba przestrzegać pewnych zasad. Za gorący klej nie będzie sklejać wystarczająco szybko, natomiast ten o za niskiej temperaturze w ogóle nie będzie się lepić. W obu przypadkach brzegi kartonu nie zostaną sklejone. Ważne jest także wykończenie powierzchni – na przykład dla lepszej przyczepności sklejać należy powierzchnie nielakierowane. Niepożądany jest ponadto nadmiar kleju, ze względów estetycznych, jak i praktycznych. Silnie zaklejone opakowania będzie trudno otworzyć, a lepiące się zacieki mogą powodować sklejanie się pudełek i zbieranie zabrudzeń. Zbyt mała ilość kleju z kolei nie zapewni trwałego złączenie brzegów pudełka.
Newralgicznym komponentem kartoniarek jest też próżniowy system chwytania i wyjmowania arkuszy kartonu z zasobnika – jeżeli nie działa prawidłowo, łatwo może zablokować maszynę. Najczęściej w tym zakresie powtarza się kilka problemów. Przykładowo zużyte chwytaki próżniowe (popękane, przetarte) nie będą w stanie zapewnić wystarczająco dużego podciśnienia, aby podnieść arkusz. Dlatego trzeba je poddawać regularnie inspekcji, a zauważając oznaki uszkodzenia, jak najszybciej wymienić. Powodem nieszczelności mogą też być zbyt luźne połączenia elementów przyssawki. Przewód podciśnieniowy nie może być zgięty. Trzeba ponadto mieć świadomość, że pył towarzyszący cięciu kartonów może zatykać system wytwarzania podciśnienia, dlatego należy go co jakiś czas czyścić.
Problemy z opakowaniami – przyczyny i rozwiązaniaCase study 1: Stwierdzono, że produkt spożywczy ma inny niż oryginalny, nieprzyjemny smak. Podejrzewano, że powodem jest materiał opakowania jednostkowego, mający z nim bezpośrednią styczność. Aby wyjaśnić, skąd bierze się przykry posmak, przeprowadzono specjalistyczną analizę technikami mikroekstrakcji do fazy stałej, chromatografii gazowej i spektrometrii masowej. Badaniu porównawczemu poddano partię kontrolną produktu, jego partię zanieczyszczoną oraz opakowanie. Potwierdziło to, że materiał tego ostatniego wszedł w reakcję i przeniknął do produktu. Dalsza analiza wykazała, że doszło do tego w wyniku niekompatybilności materiału opakowania z jego zawartością, a niepożądane reakcje przyspieszyły nieodpowiednie warunki magazynowania. Case study 2: Producent żywności wykrył nieprzyjemny zapach swojego produktu pakowanego w pudełka importowane z Chin. Żeby wyjaśnić jego źródło, przeprowadzono analizę analogicznymi metodami jak w wyżej opisanym przypadku. W zarejestrowanych w ten sposób chromatogramach wykryto piki zgodne z profilem rozpuszczalnika węglowodorowego o niskiej masie cząsteczkowej, takiego jak spirytus mineralny albo nafta. Producent żywności przedstawił te informacje dostawcy problematycznych opakowań, który w obliczu takiego dowodu przyznał, że omyłkowo zamiast jak zwykle izopropanolu do ich czyszczenia przed wysyłką użył... benzyny ciężkiej. 
Case study 3: Stwierdzono, że opakowania pewnego produktu rozszczelniają się zaledwie po kilku dniach w magazynie. Jako przyczynę zaczęto podejrzewać zmianę formuły używanego do złączania ich boków topliwego kleju poliuretanowo-akrylowego. By to udowodnić, wykonano specjalistyczną analizę porównawczą składu nowego oraz wcześniej używanego spoiwa metodą chromatografii żelowo-permeacyjnej. Wykazała ona znaczące różnice w rozkładzie ich mas cząsteczkowych. To wyjaśniało niepełną polimeryzację, która z czasem prowadziła do degradacji właściwości kleju. Zalecono w związku z tym korektę formuły spoiwa. Case study 4: Zaobserwowano rozwarstwianie się epoksydowego pokrycia wewnętrznej strony metalowych puszek. Aby wykryć przyczynę, przetestowano je pod kątem niewłaściwej aplikacji żywicy, wykonując mikroskopowy pomiar grubości powłoki, jej niewystarczającego utwardzenia, przeprowadzając badanie techniką skaningowej kalorymetrii różnicowej i zanieczyszczenia żywicy wykonując analizy technikami chromatografii gazowej ze spektrometrią masową, spektroskopii fourierowskiej w podczerwieni i energodyspersyjnej analizy rentgenowskiej. Porównując uzyskane wyniki z rezultatami badań puszek, w których problem rozwarstwienia nie występował, w tych pierwszych wykryto obecność siarki na powierzchni metalu. Przesłanie tej informacji dostawcy puszki pozwoliło na zdiagnozowanie i rozwiązanie problemu na linii ich produkcji. Case study 5: Producent pewnego produktu, w składzie którego występował alkohol, zauważył, że po zapakowaniu go w butelki z zakrętkami z tworzywa sztucznego jego smak uległ pogorszeniu, a kolor się zmienił. Podejrzewano, że źródłem problemu są wieczka opakowań. W związku z tym przeprowadzono analizę porównawczą zakrętek, które spowodowały pogorszenie jakości produktu z wieczkami nieużywanymi. Wykonując badanie metodą chromatografii gazowej ze spektrometrią masową, w pierwszych wykryto obecność kaprolaktamu. Jest to rozpuszczalny w alkoholu składnik tuszu używanego do wykonywania nadruków na zewnętrznej powierzchni wieczek. Zagadką wciąż pozostawało jednak to, jak z wierzchu zakrętki przedostał się on na jej spód, gdzie miał kontakt z produktem. Dalsze dochodzenie wykazało ostatecznie, że podczas produkcji wieczka były układane jedno na drugim. To umożliwiło przeniesienie atramentu na stronę mającą styczność z żywnością i jego rozpuszczenie przez zawarty w niej alkohol. |
Jak się pakuje w folię termokurczliwą?
Przykładem opakowania zbiorczego jest folia termokurczliwa. Jest to popularny materiał, który nie tylko chroni produkt, ale także wyróżnia się estetyką. Folie nieprzezroczyste dodatkowo eksponują swoją zawartość. Jest to materiał wytrzymały i tani.
Pakowanie w folię polega na jej cieplnym obkurczeniu. Jest to proces dwuetapowy. W pierwszym kroku produkt umieszcza się w rękawie lub półrękawie z folii i zgrzewa się jego boki. Następnie w ten sposób zamknięty pakiet wprowadza się do tunelu grzewczego, gdzie pod wpływem gorącego powietrza folia się kurczy, przybierając kształt swojej zawartości.
Dostępne są półautomaty, jak i automaty do pakowania w folię termokurczliwą. W pierwszych zgrzewanie wykonuje się ręcznie. W pełni zautomatyzowane linie pakowania w folię termokurczliwą z kolei zwykle stanowią połączenie automatu zgrzewającego oraz tunelu obkurczającego, jako oddzielnych urządzeń lub w ramach jednej maszyny.
Wyróżnia się dwa rodzaje zgrzewarek. Przepływowe wykorzystuje się do zbiorczego pakowania zestawów produktów, na przykład kilku butelek w jeden pakiet. Opakowania w nich wykonane nie są szczelne. Takie formuje się w zgrzewarkach kątowych.
Główne komponenty tuneli to z kolei komora grzewcza i wyjściowy wentylator chłodzący. By poprawić jakość obkurczania i zmniejszyć zużycie energii, wprowadza się w nich rozmaite rozwiązania konstrukcyjne w zakresie cyrkulacji powietrza w komorze grzewczej, przykładowo stosując nawiewy gorącego powietrza o małych turbulencjach czy montując grzałki elektryczne wyposażone w promienniki ciepła (radiatory), których zadaniem jest zwiększenie powierzchni oddawania ciepła. Prędkość przesuwu transportera w komorze grzewczej przeważnie można regulować. Sterować można również nawiewem gorącego powietrza, co jest przydatną opcją w przypadku nietypowych opakowań.
Radosław Sobociński
|

Folia - rozwiązywanie problemów
W tytułowym procesie pakowania szereg parametrów decyduje o wyniku końcowym. Te ważniejsze to rodzaj, jakość i rozmiar folii termokurczliwej, temperatura jej obkurczania, prędkość powietrza w tunelu cieplnym. Jeżeli nie zostaną właściwie dobrane, można się spodziewać różnych problemów.
Przykład to nadmiar foli w kształcie trójkąta, który odstaje w rogach opakowania, przypominając... uszy. Wprawdzie nie zmniejsza on poziomu ochrony zafoliowanego produktu, ale ma negatywny wpływ na estetykę opakowania. Wyróżnić można kilka przyczyn takiej wady. Najczęstsze z nich to: niewystarczające obkurczenie folii, jej zbyt duża szerokość, zbyt słaby i/lub nierównomierny obieg powietrza w tunelu grzejnym i nierównomiernie, nawijanie w zgrzewarce. Pomocne w uniknięciu tego problemu okazuje się przeważnie zwiększenie temperatury i/lub prędkości powietrza w tunelu grzejnym. Trzeba się też upewnić, że używana folia termokurczliwa spełnia standardy jakości.
Poza tym niepożądane są matowe skazy w materiale opakowania, które pękają nawet przy delikatnym dotknięciu. Są one skutkiem krystalizacji. Możliwe jej przyczyny to: zbyt wysoka temperatura i/lub nierównomierna cyrkulacja powietrza w tunelu obkurczającym, zbyt szybkie przechodzenie przez niego foliowanego produktu i niewystarczająca perforacja dla prawidłowego uwalniania powietrza. Zalecane rozwiązania w tym przypadku to: zmniejszenie temperatury i/lub prędkości powietrza w tunelu grzewczym, spowolnienie przenośnika, którym transportowany jest produkt, zwiększenie liczby punktów perforacji i kontrola stanu perforatora.
Folia może się też marszczyć. Zmarszczki zwykle rozchodzą się od rogu opakowania. Przyczyną tego może być problem na etapie zgrzewania – jeżeli przebiegło prawidłowo, zmarszczki na uformowanym opakowaniu zostają wyprostowane podczas obkurczania. Marszczenie może być także spowodowane folią zbyt obszerną i/lub o słabej jakości lub nieodpowiedniej grubości. Powstawaniu zmarszczek sprzyja również za duża prędkość transportu produktu w tunelu. Analogiczne są powody powstawania licznych drobnych wypukłości na folii, które podobnie jak zmarszczki szpecą opakowanie. Dziury w folii są z kolei najczęściej spowodowane działaniem za wysokiej temperatury, nierównomierną cyrkulacją powietrza w tunelu, niewystarczającą perforacją uniemożliwiającą prawidłowe uwalnianie powietrza. Ich powstawaniu sprzyja też kształt przedmiotu. Jeżeli na zgrzewach występują pęknięcia lub szew ten jest łatwy do rozerwania, wśród potencjalnych przyczyn tego mogą być: nagromadzenie się pozostałości folii na zgrzewarce, uszkodzenie lub zużycie jej powłoki ochronnej, nierównomierne nagrzewanie się jej ostrza. Jeżeli natomiast zgrzew jest przesunięty względem pozycji docelowej i na przykład biegnie przez środek powierzchni folii, przez którą produkt powinien być eksponowany, przyczyną może być: niewyśrodkowanie produktu na taśmociągu, którym jest transportowany przez stanowisko zgrzewania, zbyt obszerna folia (stosunek jej szerokości do długości powinien być dobrany do wymiarów produktu), nierównomierny obieg powietrza w tunelu grzewczym – jeśli przykładowo z jednej strony cyrkulacja powietrza jest większa, jego podmuch może przesunąć folię. O problemie na etapie zgrzewania świadczyć też mogą pasma plastiku widoczne między folią a produktem. W razie ich zauważenia należy sprawdzić, czy: zgrzewarka nagrzewa się do odpowiedniej temperatury, nacisk i czas podczas wykonywania zgrzewu są wystarczające, zgrzewarka nie jest zabrudzona, jej ostrze zostało odpowiednio dobrane pod kątem grubości folii.
Ponadto w dobrze wykonanym opakowaniu z folii termokurczliwej otwory perforacyjne nie powinny rzucać się w oczy. Jeżeli są wyraźnie widoczne i nierówne albo rozdarte, wskazuje to na problem. Wśród jego możliwych przyczyn są: za wysoka temperatura obkurczania, za duża prędkość powietrza w tunelu grzewczym, zbyt duże tarcie na rolce, z której rozwijana jest folia, powodujące jej rozdzieranie przez igły perforujące podczas odwijania, za mała liczba otworów perforacyjnych i/lub ich zbyt duży rozmiar.
Grzegorz Kostrzewski
|

Roboty w pakowaniu pick & place

Na liniach pakowania powszechne są też roboty przemysłowe. Zwykle realizują zadania typu pick and place. Składa się na nie następująca sekwencja czynności: podniesienie obiektu, jego przeniesienie, a potem odłożenie go w miejscu docelowym, często z zachowaniem konkretnej orientacji. Takiego podejścia wymagają produkty, które należy, ze względu na ich specyfikę, podnosić i odkładać pojedynczo. Przykładami są drobne artykuły spożywcze o delikatnej strukturze, jak ciastka czy czekoladki, które przez roboty na stanowiskach pakowania są przekładane z taśmociągu linii produkcyjnej do pudełek. Wspólnymi cechami typowych aplikacji pick and place są: bardzo duża szybkość operowania przekładanymi obiektami i stosunkowo krótkie odległości, na jakie są one przenoszone.
W zadaniu tym najczęściej wykorzystuje się roboty typu delta i SCARA. Producenci implementują w nich rozwiązania, dzięki którym lepiej sprawdzają się w takich aplikacjach. Przykładowo, biorąc pod uwagę fakt, że na stanowisku pakowania robot powinien się zmieścić razem z przenośnikiem i innym wyposażeniem pomocniczym, na przykład podajnikami opakowań zbiorczych, optymalne wykorzystanie dostępnej przestrzeni jest kluczowe. Spełnienie tego wymogu jest łatwiejsze dzięki robotom o ultralekkim i kompaktowym wykonaniu. Pracę w ograniczonej przestrzeni ułatwia też prowadzenie okablowania przez ramię robota, co zapewnia skuteczną ochronę przewodów bardziej narażonych na uszkodzenie w ciasnej przestrzeni.
Oprócz tego, aby zapewnić współpracę z przenośnikami o różnych szerokościach, wprowadzane są rozwiązania zwiększające zasięg robota, jak na przykład dodatkowe ramię i obrotowa platforma w robotach typu delta. Pamiętając o tym, że w zadaniu pick and place liczy się szybkość, ramiona robotów są konstruowane w taki sposób, aby duża prędkość była osiągalna w całym zakresie ruchu. Ważne jest także równomierne obciążenie napędów, od którego zależy powtarzalność i płynność ruchu chwytaka. Dzięki wieloosiowym nadgarstkom roboty mogą swobodnie obracać przedmioty.
Ponadto biorąc pod uwagę ogromny udział przemysłu spożywczego w branży opakowaniowej, producenci robotów do aplikacji pick and place z myślą o pakowaniu produktów żywieniowych oferują roboty w wykonaniu spełniającym wymogi higieniczne tego zastosowania. Typowe ich cechy to: gładkie, łatwe do czyszczenia powierzchnie, stosowanie smarów dopuszczonych do użytku w przemyśle spożywczym, stopień ochrony IP69K.
Maszyny i roboty usprawniają pakowanie i paletyzację
Case study 1: Producent kostek lodu rozbudował park maszynowy. Przez większą wydajność produkcji pakowanie, które nie jest zautomatyzowane, stało się wąskim gardłem. Już wcześniej był to problematyczny etap, ręczne operacje odbywały się bowiem w warunkach niekorzystnych dla personelu. Po pierwsze, ponieważ temperatura w tej sekcji wynosiła +5ºC, dla zachowania jakości produktu od pracowników wymagano dużej szybkości pracy. Problemem były także ograniczenia przestrzenne, przez które musieli się oni ciągle obracać, żeby sięgnąć po karton, który formowali w pudełko i po produkt w nim umieszczany. Rozwiązaniem okazała się częściowa automatyzacja pakowania. W tym celu zainstalowane zostały dwa ciągi przenośników umieszczone na optymalnej wysokości w stosunku do nieco niższych stanowisk ręcznego pakowania. Służą one do transportu woreczków z kostkami lodu. Wspólnym dla obu ciągów przenośnikiem ustawionym między nimi dostarczane są pudełka składane w zautomatyzowanej formownicy. Pakowacze mogą regulować prędkość podawania pustych pudełek odpowiednio do szybkości transportu worków z lodem. Pełne opakowania ustawiają na trzecim, wspólnym przenośniku, transportującym je do zaklejarki. Dzięki temu zlikwidowano wąskie gardło, jednocześnie poprawiając warunki pracy. Case study 2: Producent żywności paczkowanej chciał zwiększyć przepustowość paletyzacji. Wymagał również obsługi różnych typów palet i opakowań i elastyczności w sposobie załadunku palet. By spełnić te wymagania, skompletowano stanowisko jak na rysunku 2. Paleta jest przekazywana z zasobnika palet 1 na przenośnik palet 2. Z zasobnika przekładek 3 pobierana jest przekładka umieszczana na palecie. Równocześnie opakowania są przekazywane na przenośnik akumulacyjny 4, a następnie obracane o 90º (5). W strefie kompletacji są liczone i przenoszone na stanowisko robota (6). Jest on wyposażony w chwytak do podnoszenia jednocześnie wielu pudełek. Przenosi je na stanowisko kompletacji palet (7). Załadowana paleta jest przenoszona na stanowisko odbioru (8), oddzielone kurtyną świetlną dla bezpieczeństwa. Stąd wywozi ją wózek widłowy. Cele projektowe udało się spełnić dzięki temu, że chwytak robota dobrano tak, żeby unosił do 10 opakowań jednocześnie, a zwalniał cały rząd lub jego część. Pudełka są obracane i przekierowywane mechanicznym popychaczem w locie. Zasobnik zwalnia nową paletę, gdy poprzednia opuszcza stanowisko. Jest przystosowany do magazynowania i zwalniania palet różnego typu. 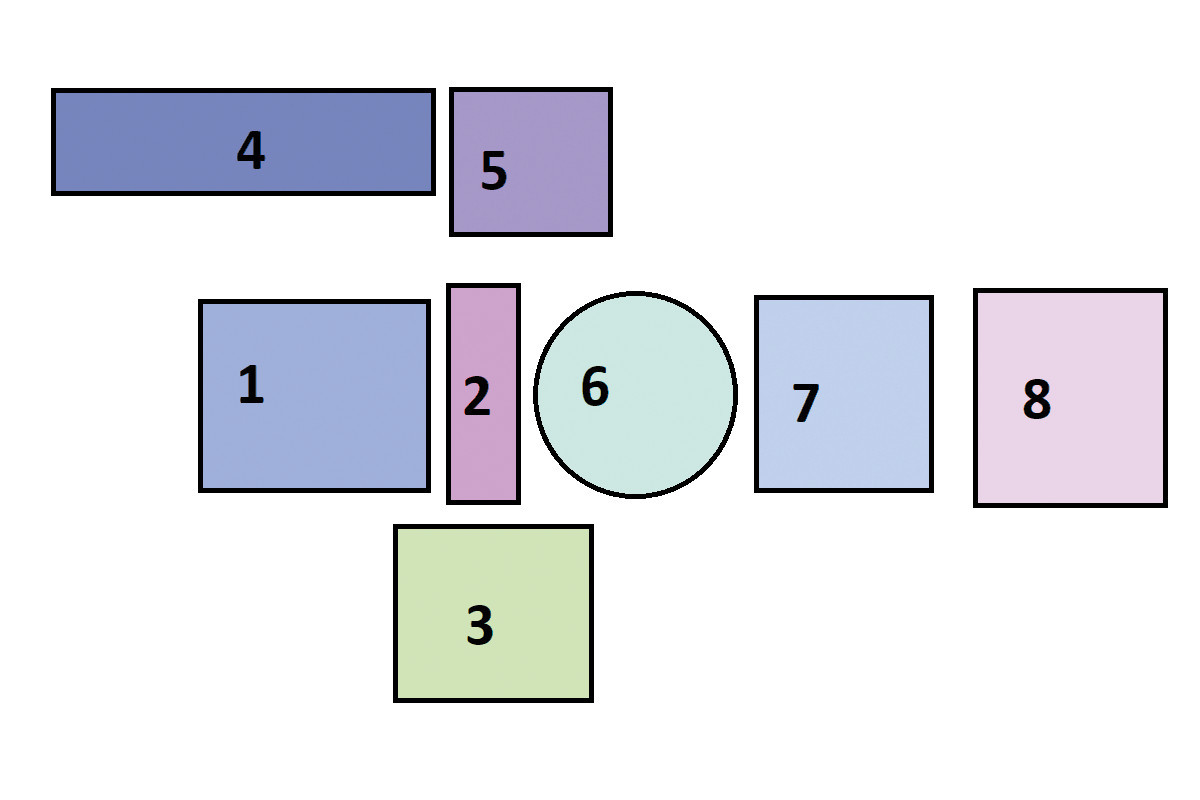
Case study 3: Producent soku w kubeczkach, aby zwiększyć przepustowość i odciążyć personel w obsłudze oraz rozwiązywaniu problemów, postanowił zautomatyzować stanowisko ich pakowania. Warunkiem było też, by w trakcie tej operacji uszkodzeniu nie ulegały foliowe wieczka kubeczków. Pierwszy cel osiągnięto, wykorzystując dwa roboty. Pierwszy układa warstwy z maksymalnie 24 kubeczków jednocześnie w jednym lub dwóch pudełkach. Drugi, zsynchronizowany z nim, pobiera z zasobnika przekładki i wkłada je między warstwami. Wybrane modele zapewniły przepustowość pakowania 500 kubeczków na minutę, co przekraczało cel projektowy (300 sztuk/min). Zapewniało to margines w przypadku wzrostu wydajności produkcji bez konieczności wprowadzania zmian na stanowisku pakowania. Aby z kolei zapobiec przebijaniu zafoliowanych wieczek i rozlewaniu soku, wykorzystano system prowadnic zaprojektowanych tak, by zapobiec ich przewracaniu się i zaczepianiu, a robot pakujący wyposażono w przyssawki. Obsługę ułatwia to, że przezbrajanie elementów stanowiska można wykonywać beznarzędziowo, za pośrednictwem panelu operatorskiego. |
Wyzwania w robotyzacji zadania pick & place
Tytułowe zagadnienie przedstawiamy na przykładzie przemysłu spożywczego. Do zadań z dziedziny produkcji i przetwarzania żywności przeważnie wykorzystywane są maszyny zaprojektowane pod kątem specyfiki produktu. Dedykowanych rozwiązań wymaga również pakowanie. W przypadku stanowisk zrobotyzowanych obejmują one głównie specjalne chwytaki, algorytmy rozpoznawania obrazów i techniki manipulowania.
Sekwencja operacji, podnieś i odłóż, dla ludzi nie jest trudna do wykonania. Robot może mieć z nią jednak szereg trudności, zwłaszcza jeżeli ma manipulować artykułem spożywczym, szczególnie w operacji pakowania, gdy jego zadaniem jest podniesienie, a potem odłożenie produktu surowego lub przetworzonego o specyficznych właściwościach. Artykuły spożywcze są bowiem w większości niesztywne, czasami kruche i łatwo ulegają odkształceniu, obtłuczeniu i pobrudzeniu, gdy wchodzą w kontakt z twardą powierzchnią. Są też podatne na skażenie. Trzeba ponadto uwzględnić to, że na ich właściwości wpływają warunki środowiskowe, jak temperatura, wilgotność i ciśnienie.
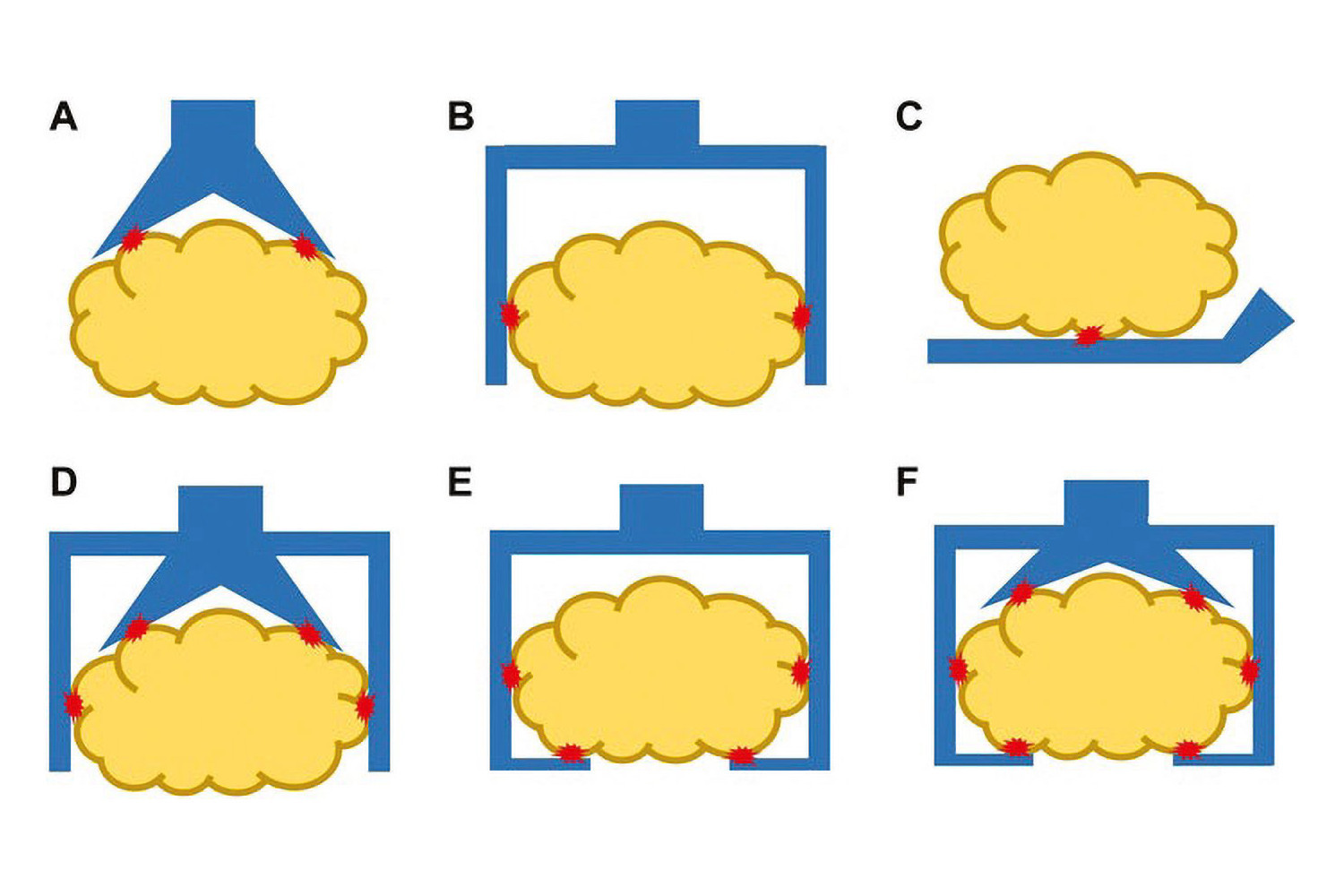
Aby temu sprostać, chwytaki robotów powinny móc operować obiektami miękkimi, z nierównymi powierzchniami i niejednolitymi kształtami oraz spełniać wymagania higieniczne. Ponadto muszą dostosowywać się do różnych typów powierzchni, na przykład mokrych i lepkich. Powinny też składać się z niewielkiej liczby elementów mechanicznych, by ograniczyć prawdopodobieństwo ich wpadnięcia do produktu spożywczego. W celu spełnienia tych wymagań opracowywane są różne konstrukcje chwytaków. Można je podzielić na kilka kategorii ze względu na sposób, w jaki stykają się z podnoszonym obiektem (rys. 1). Dalej przedstawiamy wybrane z nich.
Chwytaki
Do grupy manipulatorów, które chwytają przedmiot od góry (rys. 1a) zalicza się m.in.: przyssawki, chwytaki Bernoullego, te wykorzystujące naturalną przyczepność produktu, chwytaki zamrażające wilgotne powierzchnie i te wbijające w produkt igłę. Pierwsze wyróżnia prosta konstrukcja oraz stabilny chwyt. Z drugiej strony przyssawki najlepiej sprawdzają się, gdy powierzchnia obiektu jest płaska, gładka oraz sucha. Mogą jednak zostawiać ślady, w szczególności na surowych produktach spożywczych.
Wady te nie dotyczą chwytaków Bernoullego o minimalnej styczności z obiektem podnoszenia. Jednak ich chwyt nie jest stabilny. Zakres zastosowania chwytaków dwóch kolejnych typów jest ograniczony. Te wykorzystujące siłę adhezji są używane do podnoszenia produktów o klejącej powierzchni, jak na przykład ciasto, a zamrażające do tych mokrych, m.in. świeżych ryb. Te drugie wymagają dodatkowego mechanizmu do uwolnienia przenoszonego obiektu, na przykład przez odcięcie nożem albo podgrzanie.

Zaletą podnoszenia produktu za jego boki, gdy jest on zamknięty wewnątrz chwytaka (rys. 1b), jest możliwość dokładnego wypozycjonowania obiektu i łatwość regulacji. Z drugiej strony rozmiar produktu musi być znany zawczasu, by chwytak mógł do niego dostosować swój rozstaw. Ważne jest także zapewnienie wystarczającej siły tarcia między powierzchnią obiektu i chwytakiem, by ten pierwszy się nie wyślizgnął. Do tej kategorii zaliczane są chwytaki palczaste – typowo dwu-, ale też i wielopalczaste. Konstrukcja tych do zastosowania w przemyśle spożywczym jest modyfikowana tak, by nie uszkadzały przenoszonej żywności. W ostatnich latach w tym zakresie nastąpił znaczny postęp – opracowanych zostało wiele miękkich chwytaków na potrzeby różnych typów artykułów spożywczych. Przeważnie są napędzane pneumatycznie i pokrywane materiałem silikonowym. Dostępne są też w wykonaniu z materiałów elastycznych, które dostosowują się do kształtu obiektu.
Podnoszenie od spodu (rys. 1c) nie jest popularne w przemyśle ze względu na łatwość ześlizgnięcia się produktu. Dostępne są natomiast chwytaki do podnoszenia przez pochwycenie zarówno górnej, jak i bocznej powierzchni przedmiotu (rys. 1d). W tej grupie popularne jest łączenie siły ssania i chwytania – w użyciu są na przykład chwytaki wielopalczaste z przyssawkami na końcach palców. Chwytanie tylko za powierzchnie boczne i dolne (rys. 1e) w pakowaniu artykułów żywnościowych nie jest raczej praktykowane. Połączenie typów chwytania z rysunku 1d i 1e wykorzystują za to chwytaki łapiące za górną, boczną i dolną powierzchnię produktu (rys. 1f).
Nowe technologie w systemach wizyjnych

Aby operacja pick and place w odniesieniu do artykułów spożywczych zakończyła się sukcesem, musi uwzględniać jego specyfikę. Na przykład siła chwytania musi być wystarczająco mała, aby uniknąć uszkodzenia produktu, ale musi być jednocześnie odpowiednio duża, aby wykonać zadanie podnoszenia i odkładania bez jego upuszczania. Ponadto produkty spożywcze mają wiele odmian i występuję między nimi duże różnice w kształcie, rozmiarze, wadze, stanie powierzchni, miękkości i innych właściwościach fizycznych. By ułatwić pracę konstruktorom chwytaków, jak i później ich użytkownikom, prowadzi się prace nad kategoryzacją artykułów żywnościowych pod względem manipulowania nimi przez roboty przemysłowe. Dzięki temu w przyszłości być może będzie można zrezygnować z testów i szybciej projektować chwytaki przeznaczone do obsługi konkretnych grup produktów.
Wyzwaniem jest także sposób rozmieszczenia produktów na przenośniku. W produkcji spożywczej pod tym względem wyróżnia się generalnie dwa rozkłady: w pierwszym artykuły są ułożone w jednej linii albo są porozrzucane na przenośniku bez nakładania się, zaś w drugim są rozmieszczone losowo w pojemniku, w którym mogą się na siebie nakładać i ze sobą stykać. Do rozróżnienia poszczególnych obiektów w pierwszym przypadku wystarczy zwykle analiza obrazu 2D – wówczas zakłada się bowiem, że znane są informacje o głębokości produktu i należy rozpoznać tylko jego położenie i orientację w płaszczyźnie poziomej. W różnicowaniu produktów zazwyczaj wykorzystuje się informacje o kolorze i techniki dopasowywania wzorców. Coraz częściej w tym zastosowaniu stosuje się także techniki uczenia maszynowego. Jeżeli produkty mogą się na siebie nakładać i ze sobą stykać, wymagana jest analiza obrazu w 3D. W tym zakresie znane techniki dopasowania wzorców sprawdzają się przede wszystkim w rozpoznawaniu produktów o dobrze zdefiniowanych geometriach. W pozostałych przypadkach coraz częściej również sięga się po nowe rozwiązania, które stają się dostępne dzięki rozwojowi technologii sztucznej inteligencji.
Daniel Oblamski
|

Paletyzacja
W opakowania transportowe produkty opakowywane są na paletach. Układa się je na nich w stos w taki sposób, by jak największa ich liczba zajmowała jak najmniej miejsca. Jednocześnie ważna jest stabilność ładunku. Nie wolno też dopuścić do jego przesuwania się na palecie, jej przewrócenia ani zniszczenia poszczególnych paczek. Zadanie to w całości lub częściowo się automatyzuje.
W półautomacie paletyzacja przebiega następująco: najpierw paczki są przenoszone taśmociągiem na stanowisko, gdzie po dotarciu do ogranicznika układane są jedna przy drugiej, tworząc z kilku sztuk rząd. Następnie paczki ustawione w linii operator przesuwa na podnośnik. Na nim, rząd po rzędzie, układana jest warstwa. Gdy jest już gotowa, paczki zostają ze wszystkich stron wyrównane przez prowadnice. W kolejnym kroku płyta podnośnika przesuwa się nad paletę, gdzie zostaje wycentrowana nad poprzednią warstwą paczek. Następnie stopniowo wysuwa się spod nich, a te rząd po rzędzie układają się na ich poprzedniej warstwie. Gdy paleta jest pełna, paczki są ponownie wyrównywane i zabiera ją wózek widłowy.
Jak uniknąć problemów podczas paletyzacji?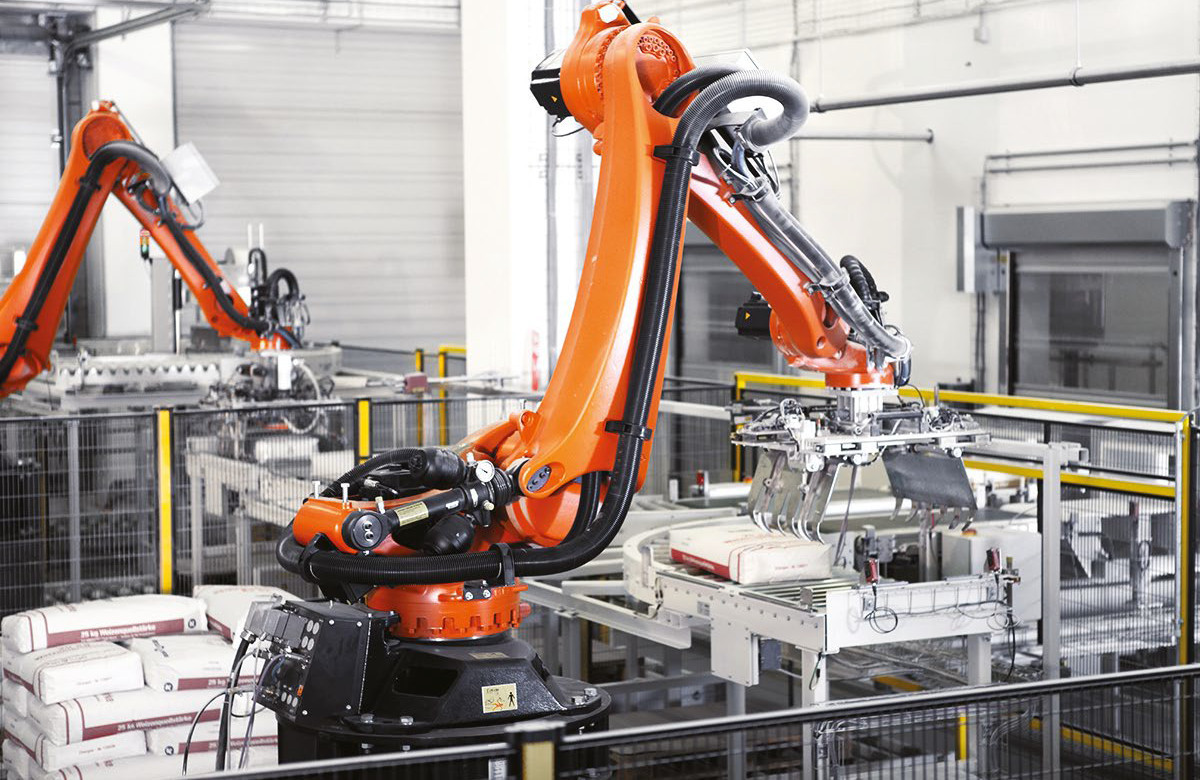
Organizując i nadzorując zrobotyzowany system paletyzacji, należy rozważyć szereg kwestii, by nie doświadczać przestojów, uzyskać maksymalną wydajność i by załadunek na palety nie pogarszał jakości produktów. Dobierając komponenty systemu, jak chwytaki, powinno się przede wszystkim wziąć pod uwagę zmienność wymiarów opakowań układanych na palety. Jeżeli tolerancja ich rozmiarów nie zostanie uwzględniona, mogą być upuszczane i zgniatane. Także przez opakowania o nieregularnych kształtach załadowane palety nie będą się prezentować schludnie, co ma wpływ na opinię konsumentów, jak również stabilność stosów, w które są układane produkty. Pojedyncze mogą z nich nawet wypadać podczas transportu. Na pracę dystrybutora palet wpływa ich jakość. Przykładowo te zamoczone podczas przechowywania na zewnątrz będą się sklejać, zwłaszcza w chłodniejszych warunkach. Dlatego warto je odstawić do wysuszenia dzień przed załadunkiem. Sczepiać będą się również palety z wystającymi gwoździami i podniszczonymi deskami. Znaczenie ma też tolerancja ich wymiarów. Przykładowo mokre palety pęcznieją. Różnice wymiarów w stosunku do tych spodziewanych znacząco wpływają na jakość paletyzacji. Dotyczy to szczególnie wysokości. Na przykład jeżeli paleta jest niższa, przy załadunku produkt zostanie upuszczony z większej wysokości, a jeżeli wyższa – zostanie wgnieciony. Ponadto jeśli robot nie jest wyposażony w czujnik wysokości palet, jego chwytak może się zderzyć ze stosem. Ważna jest też jakość przekładek używanych do separowania kolejnych warstw produktów. Istotne są ich wymiary i płaskość, uwaga zatem na wilgoć w otoczeniu, przez którą mogą ulec wypaczeniu. |
Aby zwiększyć przepustowość, usprawnia się tworzenie rzędów i warstw wykorzystując złożone systemy przenośników w pełni automatyzujące paletyzację. W zależności od konfiguracji systemu palety są obniżane z każdą uformowaną warstwą (układanie w dół) albo pozostają nieruchome, gdy podnoszone są warstwy paczek na podnośniku (układanie w górę). Półautomatyczne i automatyczne stanowiska paletyzacji dodatkowo wyposaża się w automatyczne foliarki. Owijają one w folię rzędy albo warstwy pakunków, co chroni je przed uszkodzeniem i stabilizuje ładunek palety.
W paletyzacji korzysta się też z robotów. Wyróżnia je większa elastyczność w zakresie zmiany typu obsługiwanych palet i wzorca układania paczek oraz szybkość. Najpopularniejsze typy robotów w tym zastosowaniu to: kartezjańskie, SCARA, przegubowe. Pierwsze zwykle nie sprawdzają się w paletyzacji z dużą przepustowością. Roboty SCARA wyróżnia większa wydajność operacyjna w porównaniu z kartezjańskimi, ale z drugiej strony ich udźwig nie przekracza 20 kilogramów. Sprawdzają się za to w wielotorowych liniach pakowania. Najelastyczniejsze rozwiązanie to roboty przegubowe. Charakteryzuje je również duża szybkość i udźwig, dlatego są najczęściej używane w paletyzacji.
Monika Jaworowska


















