
Rynek cobotów
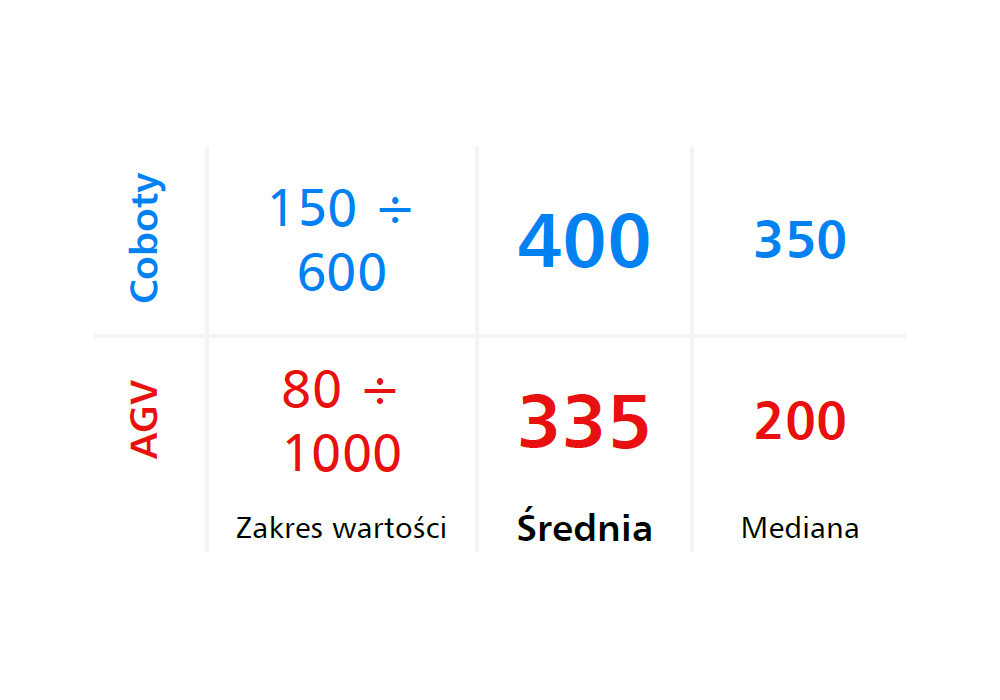
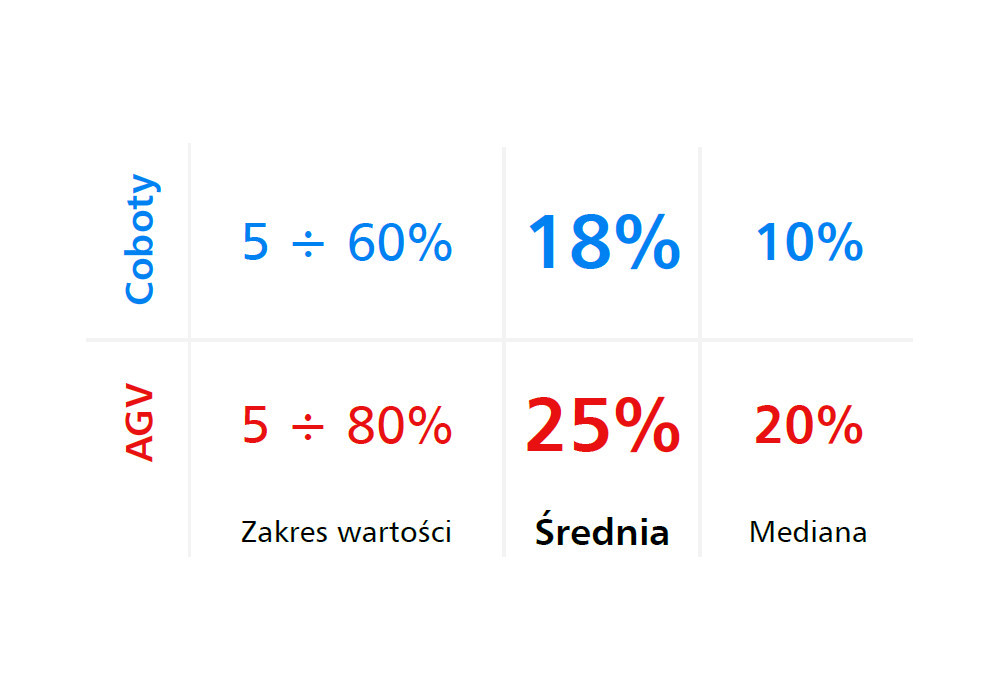
Dla większości ankietowanych przez nas dostawców coboty stanowią tylko część oferowanego asortymentu, jednak około 25% z nich dostarcza wyłącznie te maszyny. Respondenci tegorocznej ankiety szacują krajowy rynek cobotów na 150‒600 sztuk rocznie, a tempo jego wzrostu – od 5% do 60%. Dwa lata wcześniej, tj. w badaniu z 2021 roku, wartość rynku oceniana była na 100‒500 sztuk rocznie, natomiast przyrosty – od 3% do 150%. Wyraźna tendencja wzrostowa raportowana przez naszych ankietowanych znajduje także potwierdzenie w trendach światowych. Według raportu "Collaborative Robot Market" wykonanego przez MarketsandMarkets¹ globalny rynek robotów współpracujących wzrośnie z 1,1 mld USD w 2022 r. do 9,2 mld USD w 2028 r., przy średnim wzroście rocznym (CAGR) na poziomie 41,5%.
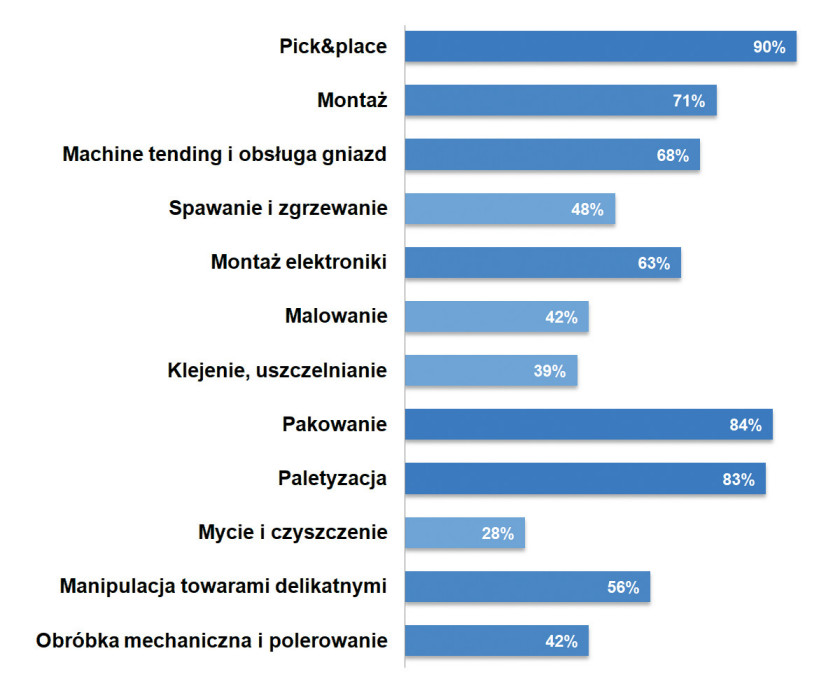
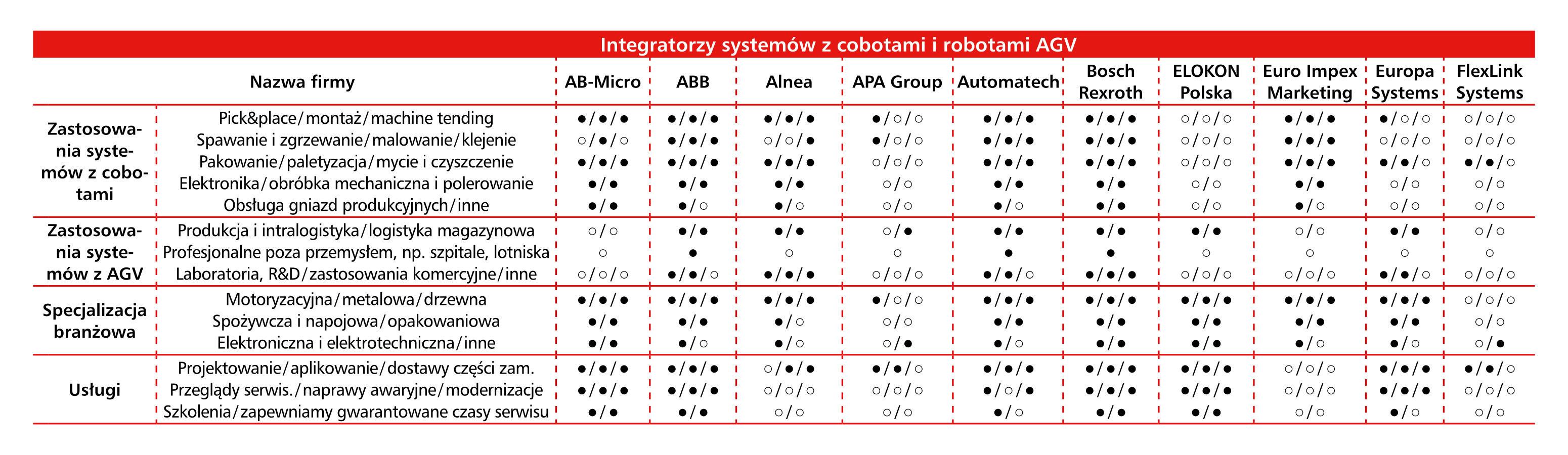
Najczęstsze zastosowania robotów współpracujących na rynku polskim to: pick & place (wskazane przez 90% ankietowanych), pakowanie (84%) oraz paletyzacja (83%). Do nieco mniej popularnych aplikacji należą montaż (71% wskazań), machine tending i obsługa gniazd (68%) oraz montaż elektroniki (63%).
Porównując obecną popularność poszczególnych aplikacji ze wskazanymi przez naszych respondentów w 2021 roku, nie dostrzeżemy zbyt dużych różnic. Dwa lata temu, podobnie jak obecnie, na pierwszym miejscu znajdowało się pick & place. Nieznacznie mniej popularniejszym zastosowaniem, w porównaniu do obecnych odczytów, był montaż oraz machine tending i obsługa gniazd. Jednak zarówno w 2021 roku, jak też obecnie, pierwsza piątka najpopularniejszych aplikacji zawiera te same pozycje.
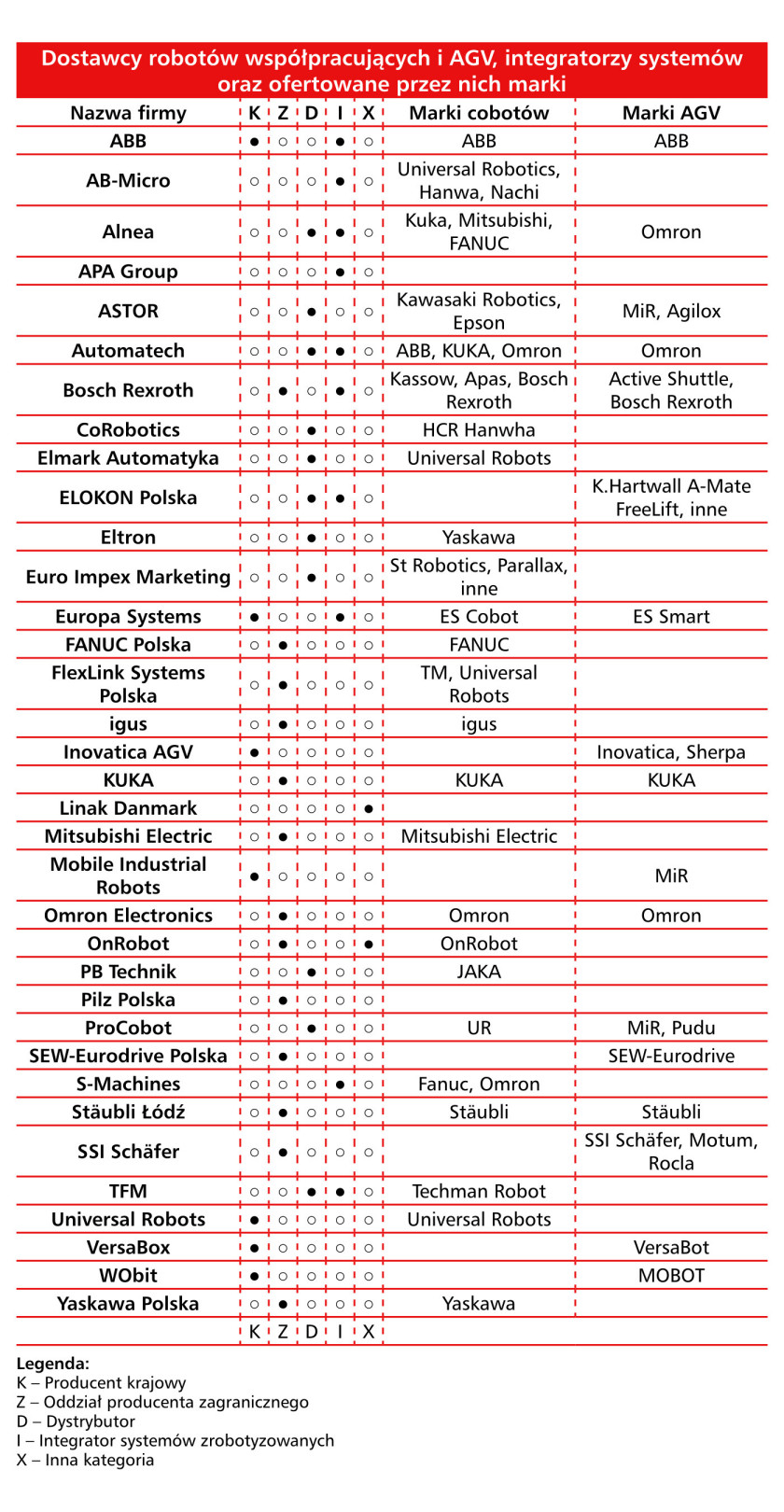
Do najbardziej znanych marek cobotów w kraju należą: Universal Robots, FANUC i KUKA. Do tego grona aspirują nieco mniej rozpoznawalne w tym segmencie rynku: Omron, ABB i Yaskawa. W porównaniu do odczytu z 2021, czołówka w tej grupie pozostaje bez zmian. Można jednak zauważyć poprawę popularności marki KUKA, w każdym razie jeżeli chodzi o wskazania raportowe.

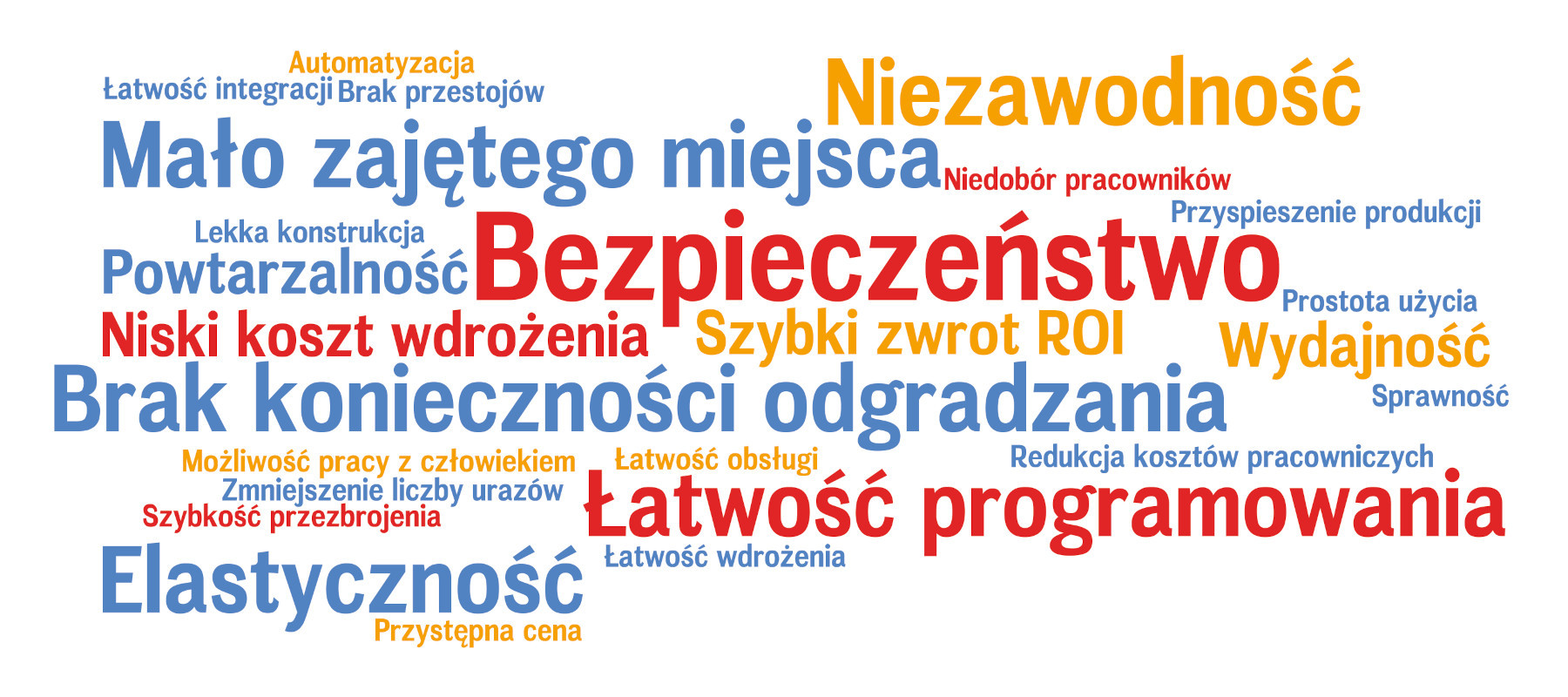
Najważniejsze powody dla których zdaniem respondentów klienci decydują się na stosowanie robotów współpracujących to: bezpieczeństwo, brak konieczności odgradzania cobotów, elastyczność aplikacyjna i łatwość programowania. Wszystkie wymienione cechy odróżniają je od tradycyjnych robotów, które w mniejszym stopniu spełniają te oczekiwania. Porównując przekazywane przez naszych respondentów argumenty przemawiającymi za cobotami obecnie do tych z 2021 roku, należy ocenić, iż nie zmieniły się one istotnie i bezpieczeństwo ogrywa wśród nich rolę najważniejszą.
Najważniejsze powody dla których zdaniem respondentów klienci decydują się na stosowanie robotów współpracujących to: bezpieczeństwo, brak konieczności odgradzania cobotów, elastyczność aplikacyjna i łatwość programowania. Wszystkie wymienione cechy odróżniają je od tradycyjnych robotów, które w mniejszym stopniu spełniają te oczekiwania. Porównując przekazywane przez naszych respondentów argumenty przemawiającymi za cobotami obecnie do tych z 2021 roku, należy ocenić, iż nie zmieniły się one istotnie i bezpieczeństwo ogrywa wśród nich rolę najważniejszą.
Z kolei na pytanie "w jakich aplikacjach najefektywniejsza i najczęstsza jest współpraca z ludźmi lub zamiast ludzi?" respondenci zwykle udzielali odpowiedzi: przy paletyzacji, montażu, spawaniu, pakowaniu oraz pick & place. W porównaniu do 2021 roku widzimy po raz pierwszy pojawienie się w tym zestawieniu aplikacji związanej ze spawaniem, której jeszcze dwa lata temu nie wymieniono.
Obawy pracowników związane z cobotami

Naszych respondentów zapytaliśmy o to, jakie obawy żywią pracownicy zakładów, w których wdrażane są roboty współpracujące. Jak można było się spodziewać – najczęściej wymieniana była niepewność własnego zatrudnienia. Tego rodzaju niepokój wśród pracowników potwierdza blisko połowa zapytanych przez nas respondentów.
Chociaż roboty współpracujące słusznie mają opinię maszyn względnie bezpiecznych dla człowieka – nie tylko ze względu na liczne stosowane zabezpieczenia, ale także mniejszą masę i rozmiary w porównaniu do tradycyjnych robotów, nie wszyscy pracownicy czują się w ich pobliżu rzeczywiście bezpiecznie. Inne wątpliwości wyrażone przez naszych respondentów w imieniu pracowników zakładów produkcyjnych to: możliwa awaryjność tych maszyn, trudne serwisowanie i konfiguracja oraz obawy o posiadane przez serwis zakładowy kompetencje w zakresie ich programowania i konfiguracji.
Kamil Niemyjski
|

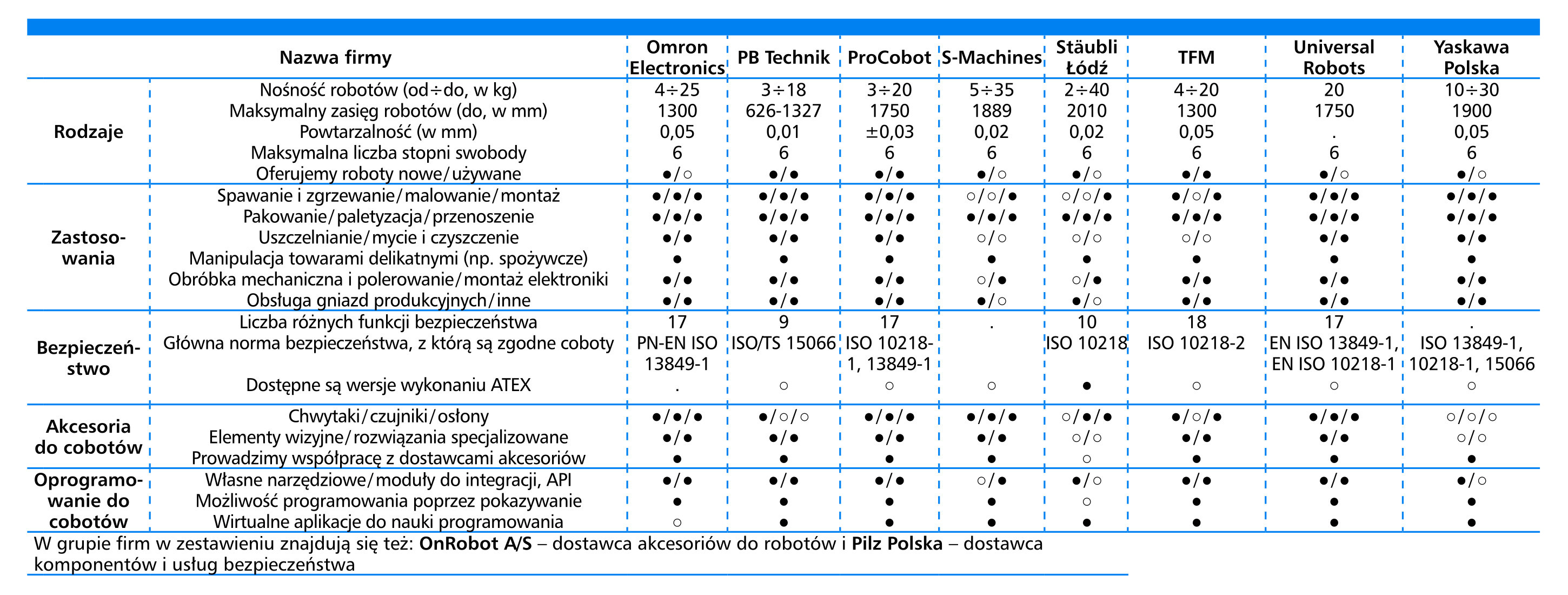
Typowe parametry cobotów

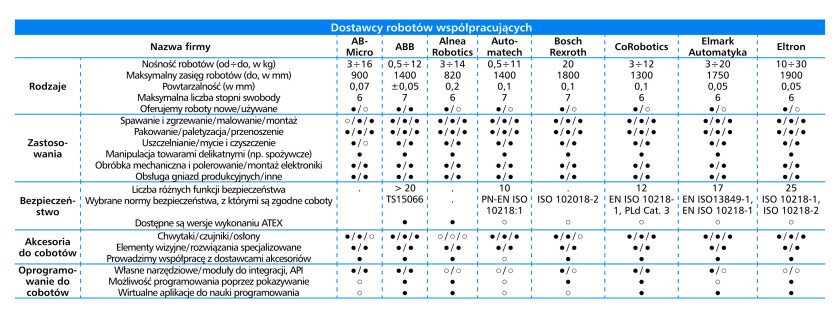
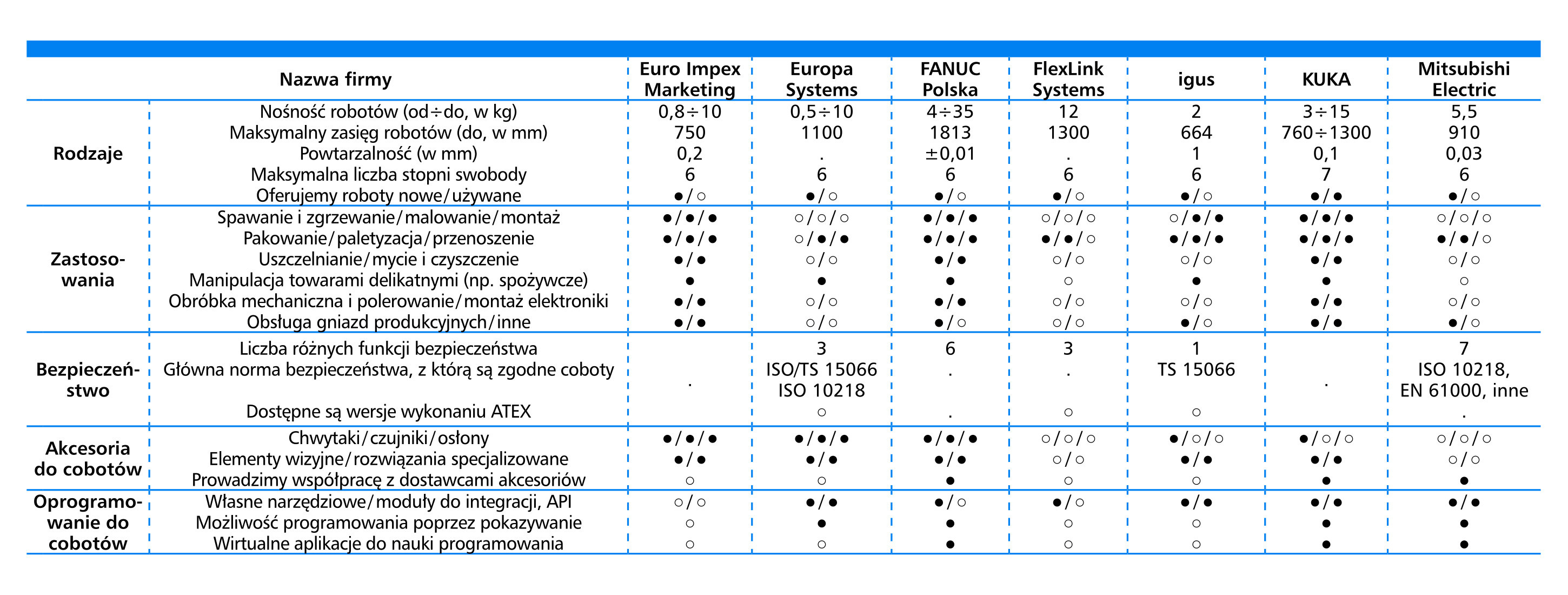
Nośność typowych cobotów zaczyna się już 0,5 kg, a kończy się na wartości 40 kg. Maksymalny zasięg opisanych w tabeli urządzeń wynosi od około 600 mm do około 2000 mm. Poza nielicznymi wyjątkami maszyn specjalizowanych, większość dostawców cobotów oferuje rozwiązania nadające się do wszelkiego rodzaju prac, takich jak spawanie i zgrzewanie, malowanie, montaż, pakowanie, paletyzacja, przenoszenie, uszczelnianie oraz mycie i czyszczenie. Większość robotów dostosowana jest także do manipulowania towarami delikatnymi – występującymi m.in. w przemyśle spożywczym. Oferowane urządzenia nadają się także bardzo często do obróbki mechanicznej i polerowania oraz montażu elektroniki i naturalnie obsługi gniazd produkcyjnych. Dostawcy dostarczają bogate wyposażenie dla swoich modeli, m.in. chwytaki, czujniki, osłony i elementy wizyjne.

Rynek robotów mobilnych

Szacunki ankietowanych dotyczące rynku robotów mobilnych znacząco się różnią między sobą. Oceny liczby dostarczanych maszyn wahają się od 80 do aż 1000 sztuk rocznie, a tempo wzrostu rynku krajowego – od 5% do 80%. W 2021 roku wartość rynku szacowana była przez naszych ankietowanych na 30‒500 sztuk rocznie, natomiast szacunki rocznego wzrostu podawane były w granicach od 10% do 250%. Jednak wyrażane przez pewną część naszych ankietowanych bardzo optymistyczne prognozy przyspieszenia sprzedaży wpisują się w światowe trendy na rynku robotów mobilnych. Według raportu badawczego wykonanego w 2022 roku przez Market Research Future (MRFR) "Mobile Robotics Market Research Report"² do 2030 roku należy spodziewać się wartości rynku AGV wynoszącej 25,3 mld USD przy średnim rocznym tempie wzrostu (CAGR) na poziomie 21,4%. Z kolei według Interact Analysis globalny rynek robotów mobilnych odnotował w 2022 roku aż 53-procentowy wzrost dostaw³. Analitycy tej firmy badawczej spodziewają się, że w najbliższych latach przychody na światowym rynku będą rosły średnio o 30‒40% rocznie.
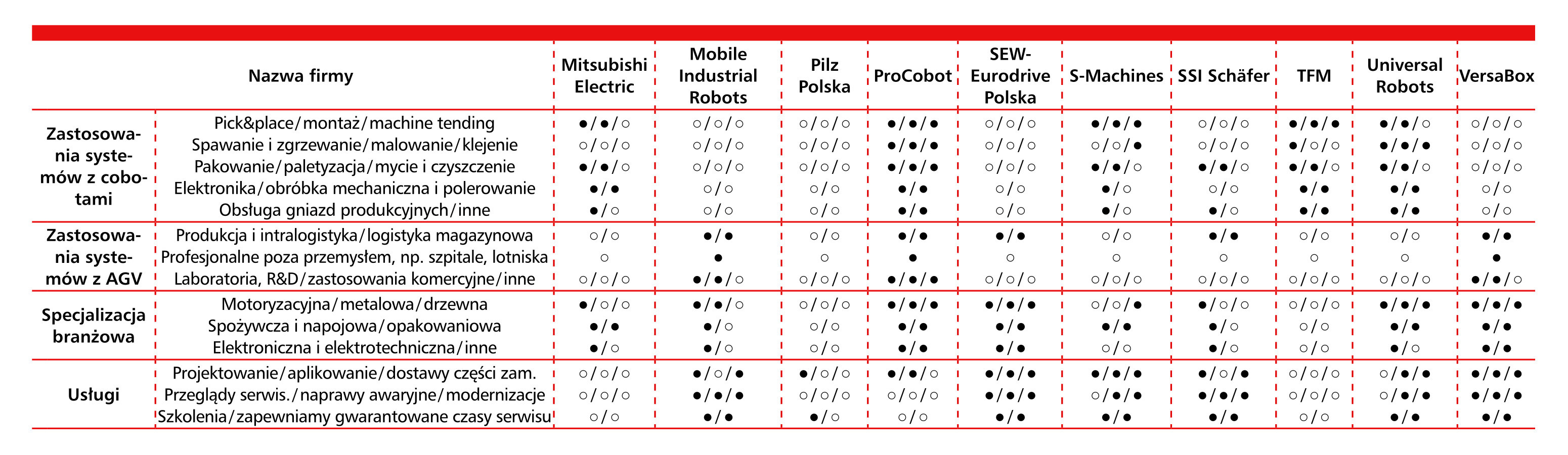
Zdaniem respondentów ankiety do najczęstszych zastosowań AGV należą dwie aplikacje wyróżniające się w sposób szczególny. Pierwsza to produkcja i intralogistyka (91% wskazań respondentów), natomiast drugą jest logistyka magazynowa (85%). Roboty mobilne występują także, choć są już mniej popularne, w takich zastosowaniach jak laboratoria i R&D oraz inne aplikacje komercyjne oraz te poza przemysłem. Porównując sytuację z 2021 rokiem, nie widać znaczących różnic. Wyjątkiem jest pojawienie się w tegorocznym zestawieniu po raz pierwszy pozycji "Laboratoria, R&D, itp.".

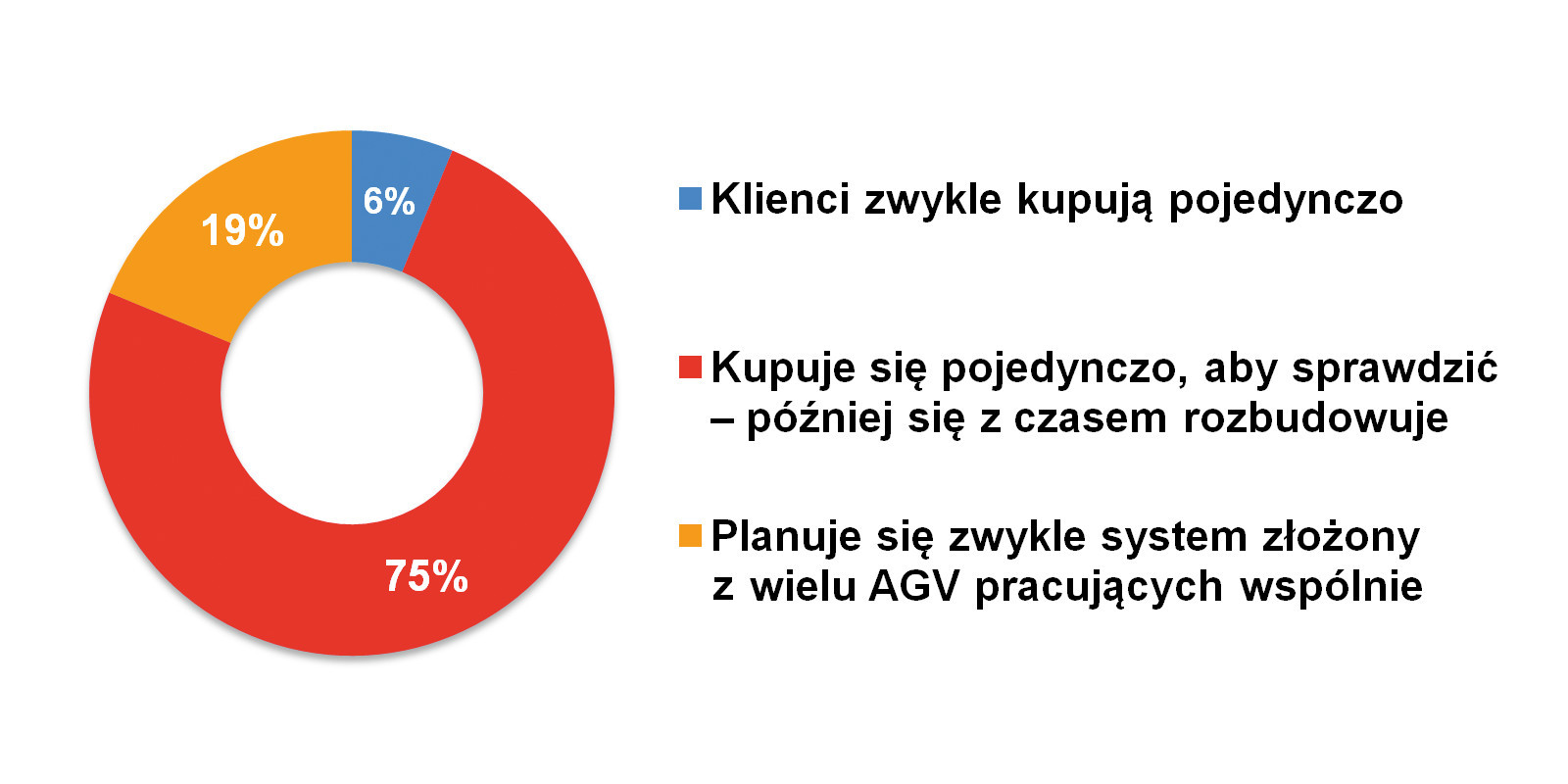
Wybierając AGV, klienci zwykle kupują je pojedynczo, aby sprawdzić możliwości tych maszyn, a następnie rozbudowują swoją flotę o nowe jednostki. Taki model inwestycyjny wskazało 75% respondentów, natomiast 19% ankietowanych skłania się ku opcji, w której klienci planują od razu złożony system składający się z wielu AGV pracujących wspólnie. Według 6% ankietowanych klienci kupują te roboty pojedynczo, na sztuki. W porównaniu z 2021 roku widać znaczącą zmianę w zachowaniach odbiorców. Dwa lata temu klienci częściej (45%) planowali od razu zakup całego systemu AVG złożonego z wielu jednostek pracujących wspólnie. Różnicę tę można traktować albo jako anomalię, wynik zbyt niskiej próbki danych lub interpretować w ten sposób, że obecnie więcej przedsiębiorstw wprowadza eksperymentalnie AGV do swoich zakładów, tak by sprawdzić ich użyteczność.
Zdaniem naszych respondentów do najbardziej popularnych producentów AGV oferowanych w Polsce należą marki: MiR, Omron, KUKA, Agilox i WObit. W porównaniu z poprzednim badaniem nie widać żadnej różnicy w czołówce zestawienia.
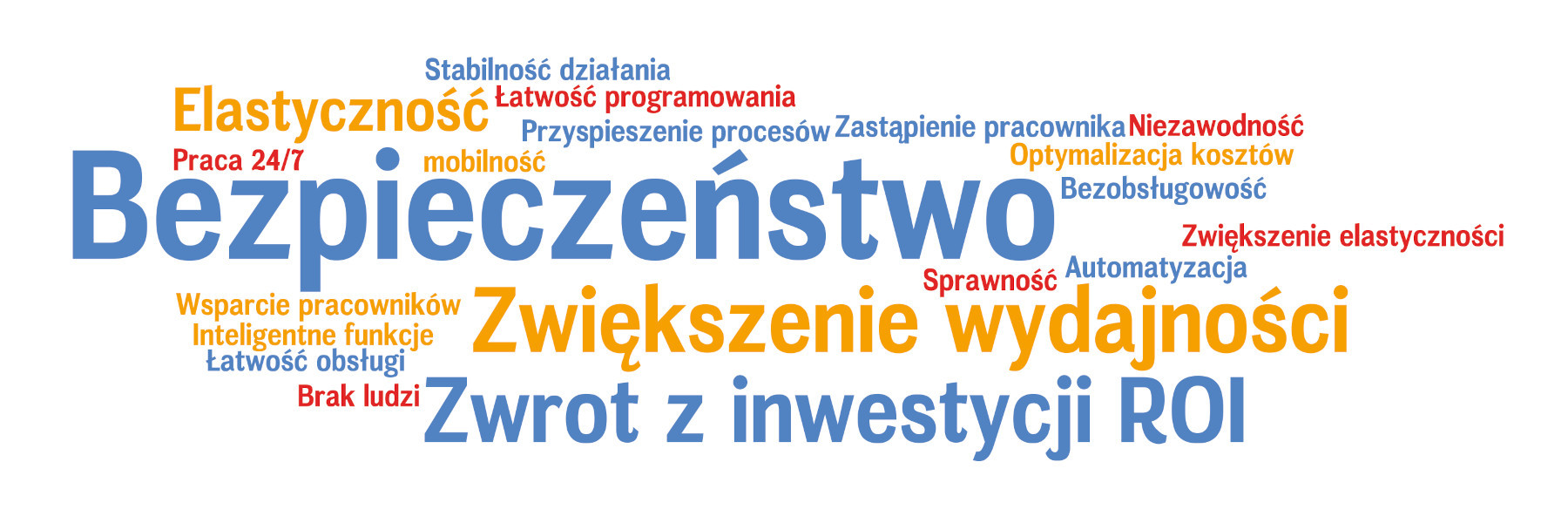
Według krajowych dostawców cechą, która w pierwszej kolejności przekonuje klientów do korzystania z AGV, jest bezpieczeństwo. Wśród innych ważnych własności robotów mobilnych wymieniane są także: szybki zwrot z inwestycji i poprawa wydajności produkcji. Porównując te wskazania z 2021 rokiem, nie widać istotnej różnicy. Także dwa lata temu na pierwszym miejscu znajdowało się bezpieczeństwo, natomiast pozostałe cechy plasujące się dość wysoko to: obniżenie kosztów, zwiększenie wydajności i optymalizacja procesów, które można traktować jako synonimy cech wskazanych w bieżących badaniu.
Branże, które są dla AGV najbardziej perspektywiczne, to zdaniem respondentów: logistyka, motoryzacja i, w nieco mniejszym stopniu, FMCG. Uzupełniając te spostrzeżenia, warto dodać, że identyczne branże wskazywali dostawcy w poprzednim badaniu rynku.

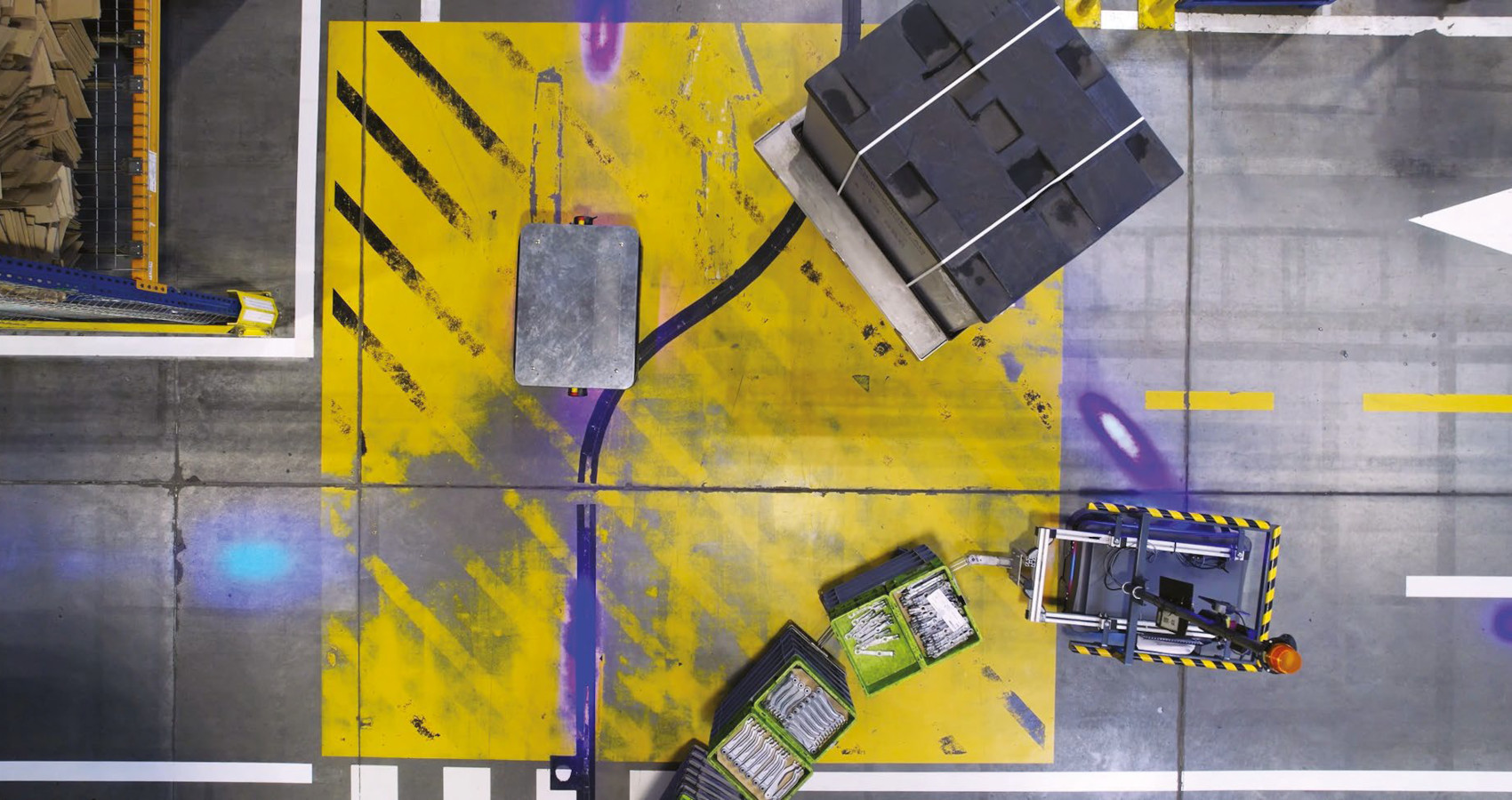
Czy AGV zastąpią przenośniki?
Naszych respondentów zapytaliśmy w dalszej części badania o to, czy AGV zastępują ich zdaniem przenośniki. Zadaliśmy także pytanie o to, co zapewnia przewagę robotom mobilnym nad tradycyjnymi sposobami transportu wewnątrzzakładowego. Odpowiadając, respondenci zwrócili uwagę na fakt, iż AGV są bardziej elastyczne aplikacyjnie i pozwalają obniżyć koszty. Do istotnych zalet AGV należy także zdolność do łączenia gniazd produkcyjnych w ciągach komunikacyjnych bez kosztownych wind, dzięki czemu można łatwo dopasować je do procesu produkcyjnego.
W kwestii pytania zasadniczego, tj. czy AGV zastąpią przenośniki, większość respondentów skłania się ku tezie, że przyszłość należy wyłącznie do robotów mobilnych, bo maszyny te dają zakładom nowe możliwości, które z każdym rokiem zyskują na znaczeniu. Automated Guided Vehicles zapewniają m.in. elastyczność oraz pozwalają na transport przez miejsca, których nie można zabudować – takie jak np. bramy czy drogi pożarowe. Nie zabrakło jednak głosów, że AGV nie są w stanie zastąpić tradycyjnych środków transportu i jedynie będą je uzupełniać.
Obawy związane z AGV są podobne jak w przypadku robotów współpracujących. Najczęściej powtarza się niepokój o miejsca pracy, które nowe, coraz bardziej inteligentne i działające niezależnie od człowieka maszyny będą zabierać ludziom zajmującym się obecnie transportem towarów tradycyjnymi wózkami. Pojawiają się także obawy o bezpieczeństwo działania tych maszyn i pytania, czy nie będą one powodować kolizji z obiektami lub, co ważniejsze – z ludźmi poruszającymi się lub pracującymi w pobliżu ciągów komunikacyjnych.
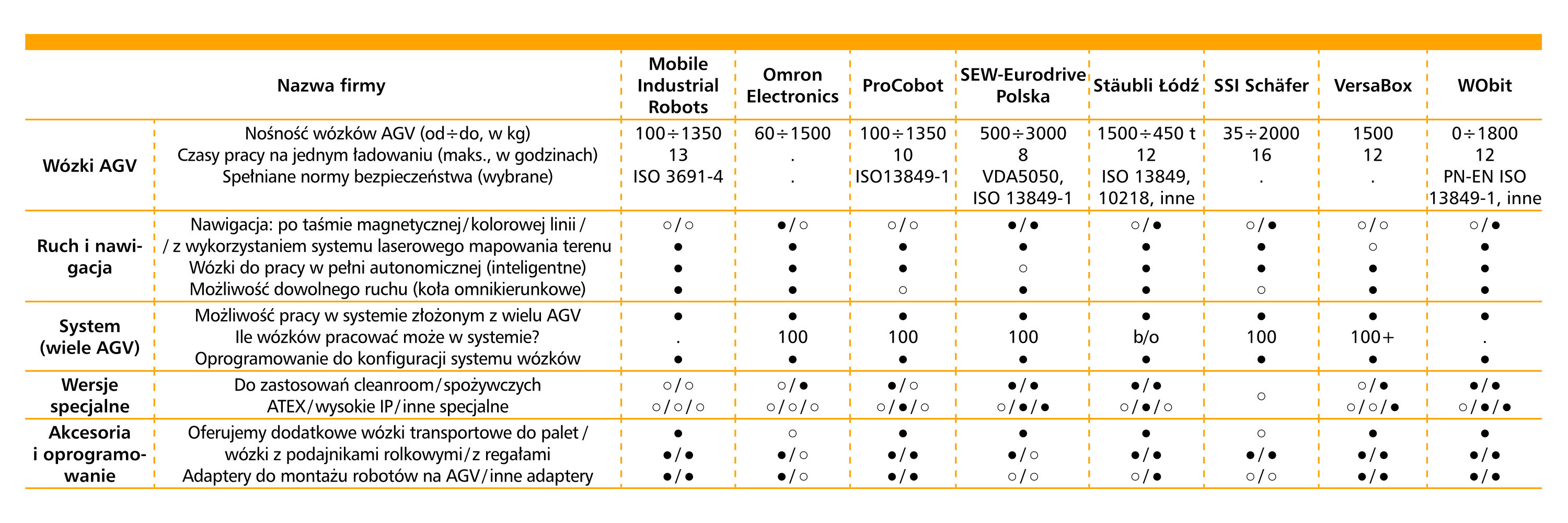
Parametry typowych AGV

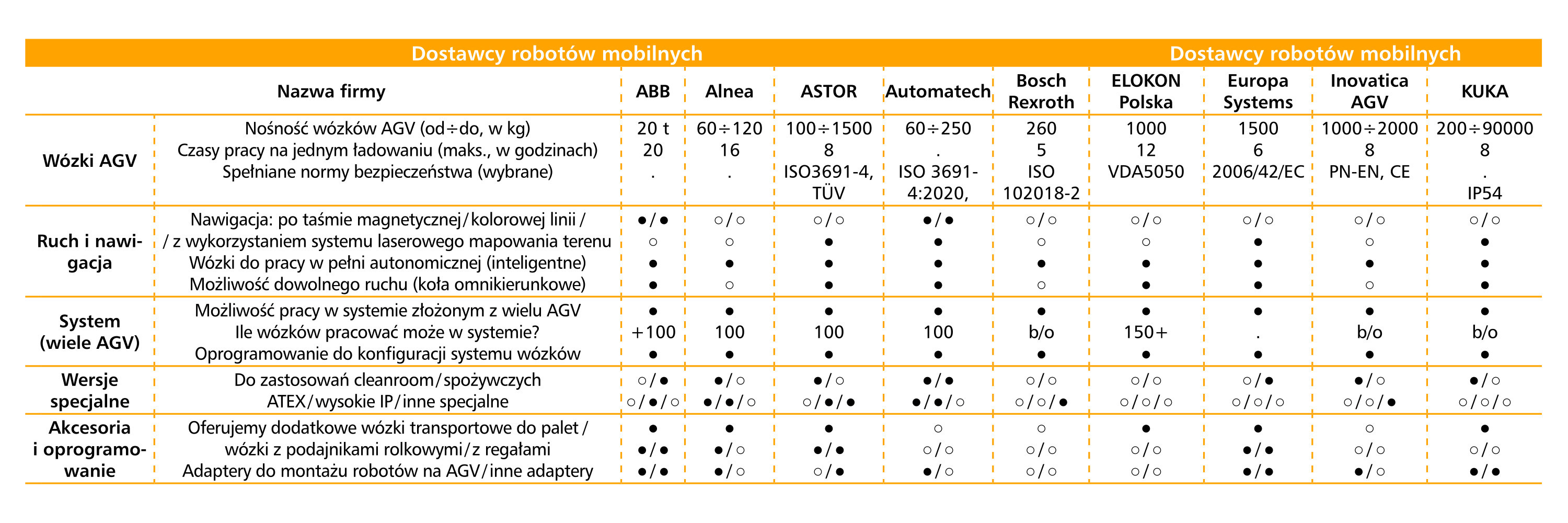
Jednym z najważniejszych parametrów AGV jest ich udźwig. Naszych respondentów zapytaliśmy o to, jakie rodzaje robotów są najpopularniejsze. Okazuje się, że większość klientów zainteresowana jest udźwigiem do 1 tony, ale część dostawców otrzymuje także zapytania o rozwiązania z udźwigiem powyżej tej wartości – nawet o maszyny pracujące z masami około 10 ton.
Obecnie wszyscy dostawcy oferują możliwość pracy w systemie wielu wózków jednocześnie w liczbie powyżej 100 maszyn. Zrobotyzowane wózki prawie wszystkich prezentowanych w naszym zestawieniu dostawców mają także dostępną funkcję dowolnego ruchu kół (koła omnikierunkowe). Większość oferuje także dodatkowe wózki transportowe do palet, wózki z podajnikami rolkowymi lub z regałami oraz adaptery do montażu robotów na AGV / inne adaptery.

Coboty – nowości technologiczne
Wśród nowinek technologicznych wymienianych przez respondentów odnośnie do robotów współpracujących wyróżniają się: dodatkowe funkcje bezpieczeństwa, poprawa parametrów IP (Ingress Protection), większe możliwości operowania dzięki robotom siedmioosiowym, doskonalsze systemy wizyjne, zdalne monitorowanie stanu robotów oraz dodatkowe funkcje integrujące z siecią i innymi urządzeniami działającymi w zakładzie.
Sławomir KowalskiBosch Rexroth
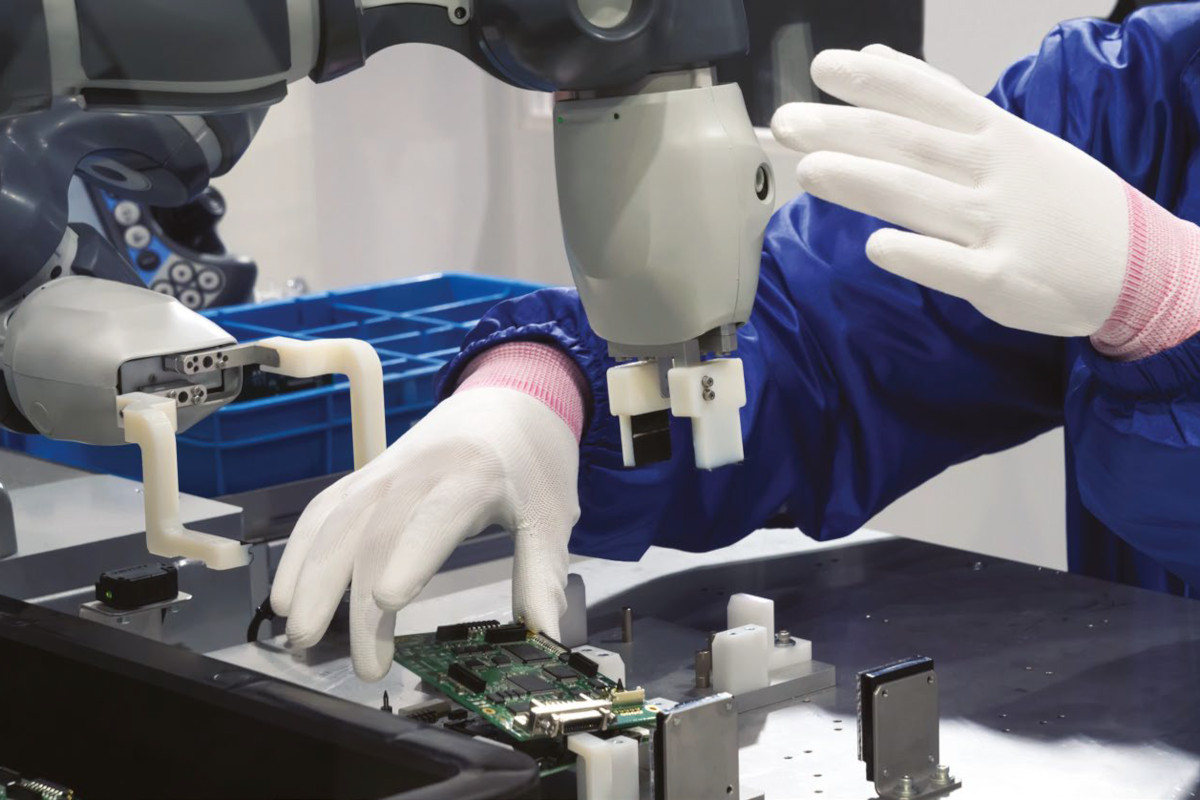
Roboty współpracujące mają wiele znaczących cech odróżniających je od tradycyjnych robotów przemysłowych. Przede wszystkim chodzi o bezpieczeństwo, jakie zapewniają one w interakcji z człowiekiem. Postęp technologiczny i zastosowane systemy bezpieczeństwa sprawiły, że pracownik może bezpiecznie współpracować z takim robotem. Warto również zaznaczyć, że coboty cechuje bardzo duża elastyczność w dostosowaniu się do warunków produkcyjnych. W przeciwieństwie do robotów przemysłowych, zmiana miejsca pracy i przeprogramowanie cobota jest możliwe w bardzo krótkim czasie, nawet bez angażowania wykwalifikowanych automatyków.
Przy wyborze konkretnego rozwiązania warto dokonać wstępnej analizy potrzeb produkcyjnych i warunków tam panujących. Czynności wymagające ciągłej i powtarzalnej pracy to najlepsze miejsca, w których można wykorzystać takie maszyny. Cobot idealnie sprawdzi się we współpracy z centrami obróbczymi i maszynami CNC – w podawaniu i odbieraniu elementów z obrabiarki, a także w aplikacjach pakowania produktów do opakowań zbiorczych i paletyzowaniu.
Ostatnią kwestią związaną z inwestycją w robota współpracującego jest jego uruchomienie na linii produkcyjnej oraz gwarancja i serwis posprzedażowy. O ile gwarancja jest sprawą uregulowaną prawnie, o tyle serwis i uruchomienie robota pozostają kwestią, o której kupujący powinien rozmawiać z dostawczą. Uruchomienie samego robota nie jest trudne. To sprawy związane z podłączeniem robota do linii produkcyjnej i współpracy w cyklu produkcyjnym mogą być problematyczne. Dlatego, biorąc pod uwagę zakup robota, konieczne jest przeanalizowanie swojej decyzji pod kątem współpracy wybranego rozwiązania z linią produkcyjną. |
I. Funkcje bezpieczeństwa

Coboty od samego początku swojego istnienia miały cechy i wyposażone były w funkcje, które miały za zadanie zmniejszyć potencjalne zagrożenia przez nie stwarzane. Funkcje te obejmują: sprzężenie zwrotne siły, monitorowanie prędkości, a także zastosowanie serwomotorów o niskiej bezwładności i technologii wykrywania kolizji, która ogranicza siłę robota do poziomów bezpiecznych w kontakcie z człowiekiem. Do tego doszły lekkie ramy, które minimalizują potencjalne skutki kolizji, zaokrąglone krawędzie i ograniczona liczba punktów zaciskania.
Norma bezpieczeństwa ISO 10218 i specyfikacja techniczna ISO/TS 15066 określają funkcje bezpieczeństwa i wydajność robota współpracującego. Zgodnie z ISO/TS 15066 monitorowanie siły oraz prędkości cobota są ustalane na podstawie cech aplikacji, obszaru kontaktu z człowiekiem i zagrożeń w miejscu pracy. Należy pamiętać, że roboty współpracujące wyposażone są jednak w funkcję, której nie mają standardowe roboty: możliwość przełączania między trybami współpracy i braku współpracy z człowiekiem. Coboty wchodzą w tryb współpracy, gdy ich prędkość spada poniżej prędkości granicznej 250 mm/s na oś. Norma ISO 10218 zdefiniowała to odcięcie jako stosunkowo bezpieczną prędkość dla ludzi znajdujących się w pobliżu robota. Wówczas cobot może relatywnie "bezpiecznie" zetknąć się z ciałem człowieka, nie powodując poważnych obrażeń. Otrzymując stałe informacje o wykrywanym ruchu, cobot może zareagować, zatrzymując się, jeśli on lub człowiek przekroczą ustalone dopuszczalne limity.
Najnowsze laserowe skanery obecności człowieka mogą jeszcze bardziej ograniczać ryzyko wystąpienia zdarzeń niepożądanych. Jeśli taki skaner wykryje pracownika w obszarze działania robota, oprogramowanie automatycznie spowolni urządzenie lub całkowicie je zatrzyma. W miarę oddalania się pracownika ruch zostanie przywrócony, przywracając robota do pełnej prędkości i wydajności dopiero po całkowitym opuszczeniu przez człowieka obszaru roboczego.

II. Nowoczesne systemy wizyjne

Systemy wizyjne przeznaczone dla cobotów stają się niezbędnym wyposażeniem tych maszyn w coraz większej liczbie aplikacji. To właśnie "oczy" cobota pozwalają mu precyzyjnie i dokładnie wykonywać złożone zadania. Obecnie dostępnych jest wiele typów systemów wizyjnych, takich jak kamery 3D, systemy wizyjne 2D oraz 2,5D. Dobór właściwego rozwiązania zależy od rodzaju zastosowania. Kamery 2D są tańsze, ale mniej wszechstronne i o bardziej ograniczonych możliwościach w porównaniu do wersji 3D. Zazwyczaj kamery 2D pozwalają określić długość i szerokość obiektów. Z kolei kamery 3D dostarczają wszystkich informacji wizualnych, jakich może potrzebować robot, obejmując wszystkie trzy osie. Kamery 2,5D to technologia wypełniająca lukę pomiędzy rozwiązaniami 2D i 3D – zarówno pod względem kosztów, jak i możliwości. Urządzenia te są w stanie określić wysokość obiektów, co może być przydatne np. w zastosowaniach, w których przedmioty muszą być układane w stosach.
Uczenie maszynowe i sztuczna inteligencja pozwalają ramionom robotów coraz lepiej "widzieć" obiekty, rozróżniać je i wykonywać w obszarze roboczym czynności wymagające lokalizowania przedmiotów – np. podczas ich układania lub przemieszczania z miejsca na miejsce.

III. Zdalne monitorowanie stanu robota
W ostatnim czasie, zwłaszcza w okresie pandemii, wyraźnie wzrosły możliwości pracy zdalnej z robotami współpracującymi. Zdalne monitorowanie, zdalne programowanie i dedykowane rozwiązania do serwisowania predykcyjnego robotów zapewniają użytkownikom końcowym liczne korzyści: od skrócenia przestojów i poprawy wydajności po wspieranie ciągłości biznesowej.
Narzędzia do zdalnego programowania i identyfikacji stanu cobota umożliwiają dostęp do urządzeń ze zdalnych lokalizacji za pośrednictwem laptopa, komputera lub smartfona. Korzyści ze zdalnego dostępu są oczywiste: wgląd przez 24 godziny na dobę poprawia ciągłość produkcji, skraca okres przestojów i eliminuje konieczność programowania robota w miejscu jego. Zdalny dostęp sprawia także, że koszty związane z usuwaniem usterek przez inżynierów są niższe.
Rozwój technologiczny robotów mobilnych

Wśród wskazanych przez respondentów nowości technologicznych dotyczących AGV najczęściej powtarzały się: większe możliwości współpracy we flocie i z pozostałymi maszynami, współpraca robotów różnych producentów oraz nawigacja SLAM.
I. Zarządzanie flotą pojazdów AGV
Od samego początku rozwoju koncepcyjnego tych urządzeń pojedyncze AGV łączone były w całe floty pojazdów. Początkowo umożliwiało to zastępowanie zadań poszczególnych jednostek w czasie ładowania ich akumulatorów, a obecnie uwzględnia się wiele różnych czynników, które należy brać pod uwagę przy optymalizacji działania posiadanych przez zakład robotów. Zarządzanie flotą pojazdów znajdujących się w ruchu jest jednak zadaniem bardziej złożonym niż administrowanie pojedynczymi robotami mobilnymi.
Oprogramowanie zajmujące się zarządzaniem flotą służy do przydzielania zadań (zleceń), które należy optymalnie przypisać do konkretnego AGV4. Najprostszym sposobem rozwiązania tego problemu jest przydzielenie zadania do AGV znajdującego się najbliżej pozycji obiektu, którego zlecenie dotyczy. Po tym etapie kolejnym krokiem jest wyznaczenie najkrótszej ścieżki do miejsca docelowego – zaplanowanie ścieżki. Algorytmy wyznaczające optymalną ścieżkę wykorzystują cyfrową reprezentację otoczenia do wyszukiwania sekwencji ruchów pozwalających jak najszybciej osiągnąć cel. Ważne jest przy tym, aby pojazd AGV mógł odpowiednio nawigować w swoim środowisku, do czego niezbędna jest prawidłowa lokalizacja robotów mobilnych. Nawet jeżeli algorytm plaplanowania ścieżki obliczył najkrótszą drogę dla AGV, nie oznacza to, że maszyna będzie mogła podążać tą ścieżką bez żadnych problemów. Konieczna jest jej ciągła adaptacja w czasie rzeczywistym, bowiem nieprzewidziany obiekt – inne pojazdy, roboty lub osoba mogą ścieżkę zablokować. O unikanie kolizji oraz sytuacji, w której wiele pojazdów AGV może ulec awarii, odpowiada inna podstawowa funkcjonalność oprogramowania do zarządzania flotą – planowanie ruchu. Dzięki niej udaje się unikać kolizji z innymi statycznymi lub dynamicznymi obiektami. Algorytm, zapobiegając blokowaniu pojazdów, ogranicza liczbę pojazdów na danym obszarze. Ograniczanie liczby pojazdów na danym obszarze nazywa się kontrolą strefową. Po dotarciu AGV do miejsca docelowego następuje zazwyczaj załadunek towaru. Dokładnie te same zadania są następnie wykorzystywane do przeniesienia załadowanego przedmiotu do stanowiska komisjonowania.
Równolegle do opisanych zadań realizowane jest inne podstawowe funkcje – zarządzanie pojazdami, czyli kontrola i monitorowanie statusu AGV. W zakres funkcjonalny tego zadania wchodzi m.in. dbałość o takie kwestie jak żywotność baterii, wymagania konserwacyjne i obsługa błędów. Zarządzanie akumulatorami w systemach pojazdów AGV jest szczególnie ważne dla obniżenia kosztów i zwiększenia wydajności systemów zrobotyzowanych. W zależności od czasu ładowania akumulator można naładować całkowicie lub częściowo, aby wypełnić lukę do następnego ładowania. Za optymalizację harmonogramu ładowania odpowiada przeznaczony do tego zadania algorytm.
II. Nawigacja SLAM

SLAM (Simultaneous Localization and Mapping) sprawia, że pojazdom AGV, a także innym robotom, łatwiej jest nawigować w przestrzeni. Metody i technologie SLAM rozwijane są od wielu lat, ale dzięki znacznej poprawie szybkości przetwarzania komputerowego i dostępności tańszych czujników, takich jak kamery i dalmierze laserowe, SLAM jest obecnie wykorzystywany w coraz większej liczbie dziedzin.
Systemy SLAM mogą wykorzystywać takie informacje jak liczba obrotów kół oraz dane z kamer i innych czujników przetwarzających obraz, po to aby określić odległości i lokalizację w przestrzeni. Robot może jednocześnie korzystać z kamery i innych czujników, aby stworzyć mapę przeszkód w swoim otoczeniu. Zadanie to nazywane jest mapowaniem.
W SLAM wykorzystywane są dwa rodzaje komponentów technologicznych. Pierwszym jest przetwarzanie sygnału z czujników, drugi to optymalizacja pozycji, która jest niezależna od stosowanego czujnika. Możemy też wyróżnić dwie metody wyznaczania położenia na podstawie danych pochodzących od wspomnianych rodzajów czujników: Visual SLAM oraz LiDAR SLAM5. Visual SLAM (lub vSLAM) wykorzystuje obrazy pozyskane z kamer i innych czujników obrazu. W tym procesie zastosowanie znajdują kamery szerokokątne, kamery typu rybie oko i sferyczne, kamery złożone oraz kamery RGB-D (kamery głębi i ToF). Z kolei wykrywanie światła i określanie odległości (LiDAR) to metoda wykorzystująca przede wszystkim czujnik laserowy (czujnik odległości).



Źródłem wszystkich danych przedstawionych w tabelach oraz na wykresach są wyniki uzyskane w badaniu ankietowym przeprowadzonym w 2023 roku wśród firm dostarczających i integrujących w Polsce roboty współpracujące oraz AGV.
¹) "Collaborative Robot Market – Global Forecast to 2028" https://www.globenewswire.com/news-release/2023/03/06/2620652/0/en/Latest-Report-on-Collaborative-Robot-Cobot-Market-worth-US-9-2-billion-by-2028-Growing-at-a-CAGR-of-41-5.html
²) "Mobile Robotics Market Research Report" https://www.globenewswire.com/en/news-release/2022/09/22/2521240/0/en/Mobile-Robotics-Market-Size-to-Surpass-USD-25-3-Billion-at-a-21-40-CAGR-by-2030-Report-by-Market-Research-Future-MRFR.html
³) "Mobile robot shipments increased by 53% in 2022" https://www.therobotreport.com/mobile-robot-shipments-increased-by-53-in-2022/
4) "Automated Guided Vehicle Systems, State-Of-The-Art Control Algorithms and Techniques" M. De Rycka, M. Versteyhea, F. Debrouwere
5) "What Is SLAM?" https://www.mathworks.com/discovery/slam.html























