
KONSTRUKCJE SPECJALNE
 Ważne parametry odnoszące się do warunków pracy serwosilnika to: klasa izolacji, temperatura i stopień ochrony IP. Jeżeli chodzi o dwa ostatnie, w większości aplikacji wystarczy zakres od 0°C do +45°C oraz szczelność IP65.
Ważne parametry odnoszące się do warunków pracy serwosilnika to: klasa izolacji, temperatura i stopień ochrony IP. Jeżeli chodzi o dwa ostatnie, w większości aplikacji wystarczy zakres od 0°C do +45°C oraz szczelność IP65.
Dostępne są oprócz tego serwosilniki do zastosowań specjalnych - na przykład w wykonaniu przeciwwybuchowym i higienicznym o budowie ułatwiającej mycie w systemach SIP (Sterilisation In Place) oraz CIP (Clean In Place). W konstrukcji tych drugich, używanych m.in. w przemyśle farmaceutycznym i spożywczym, wykorzystuje się różne rozwiązania ułatwiające utrzymanie ich w czystości.
Przykładami są: obudowa wykonana ze stali nierdzewnej zapewniająca odporność na korozję pod wpływem środków chemicznych używanych do mycia, jeden kabel do zasilania i przesyłu sygnału sprzężenia zwrotnego, brak w obudowie elementów wystających i płaskich powierzchni, na których mogłyby się gromadzić płyny, uszczelnienia wału oraz złączy kablowych, które zapewniają stopień ochrony IP67 (wodoszczelność) lub IP69K (możliwość mycia pod dużym ciśnieniem) i zapobiegają wypływowi smarów, specjalne smary dopuszczone do użytku przy kontakcie z żywnością i napisy na obudowie naniesione laserowo, dzięki czemu brak w nich rowków, w których zbierałby się brud i namnażałyby się bakterie.
SILNIKI O MAŁEJ BEZWŁADNOŚCI ORAZ RESOLWERY
W niektórych zastosowaniach znacznie mają waga i rozmiary serwosilnika. Dotyczy to na przykład maszyn, w których jedna z osi porusza drugą osią. W ich przypadku konstruktor powinien wybrać jak najlżejszy i możliwie najmniejszy serwosilnik.
Niektórzy producenci mają również w swojej ofercie serwosilniki o specjalnej konstrukcji, która zapewnia mniejszą bezwładność w porównaniu do innych modeli. Wyróżniają je mniejsze rozmiary i większy moment obrotowy, dzięki czemu sprawdzają się wtedy, gdy wymagane są kompaktowość, duża precyzja i wydajność jednocześnie.
Jeżeli chodzi o komponenty dodatkowe, serwosilniki wyposaża się w hamulce elektromagnetyczne, przekładnie, a nawet wbudowuje się w nie sterowniki. Ostatnie rozwiązanie pozwala na tworzenie zdecentralizowanych systemów serwonapędowych, w których układy sterowania zabudowane w poszczególnych silnikach komunikują się między sobą i z systemem nadrzędnym za pośrednictwem sieci przemysłowej.
Elementem nieodzownym są także przetworniki kąta obrotu. Te ostatnie to przeważnie: resolwery, enkodery inkrementalne albo enkodery absolutne. Resolwery to przetworniki indukcyjne, w których napięcie indukowane w uzwojeniach stojana jest proporcjonalne do kąta obrotu wirnika.
Dostarczają sygnału analogowego, dlatego rozdzielczość pomiaru zależy w ich przypadku od rozdzielczości przetwornika analogowo-cyfrowego. Resolwery charakteryzuje większa wytrzymałość na trudne warunki otoczenia (wysokie temperatury, wibracje, zapylenie), lecz mniejsza dokładność pomiaru w porównaniu do enkoderów.
Krzywka elektroniczna w prasach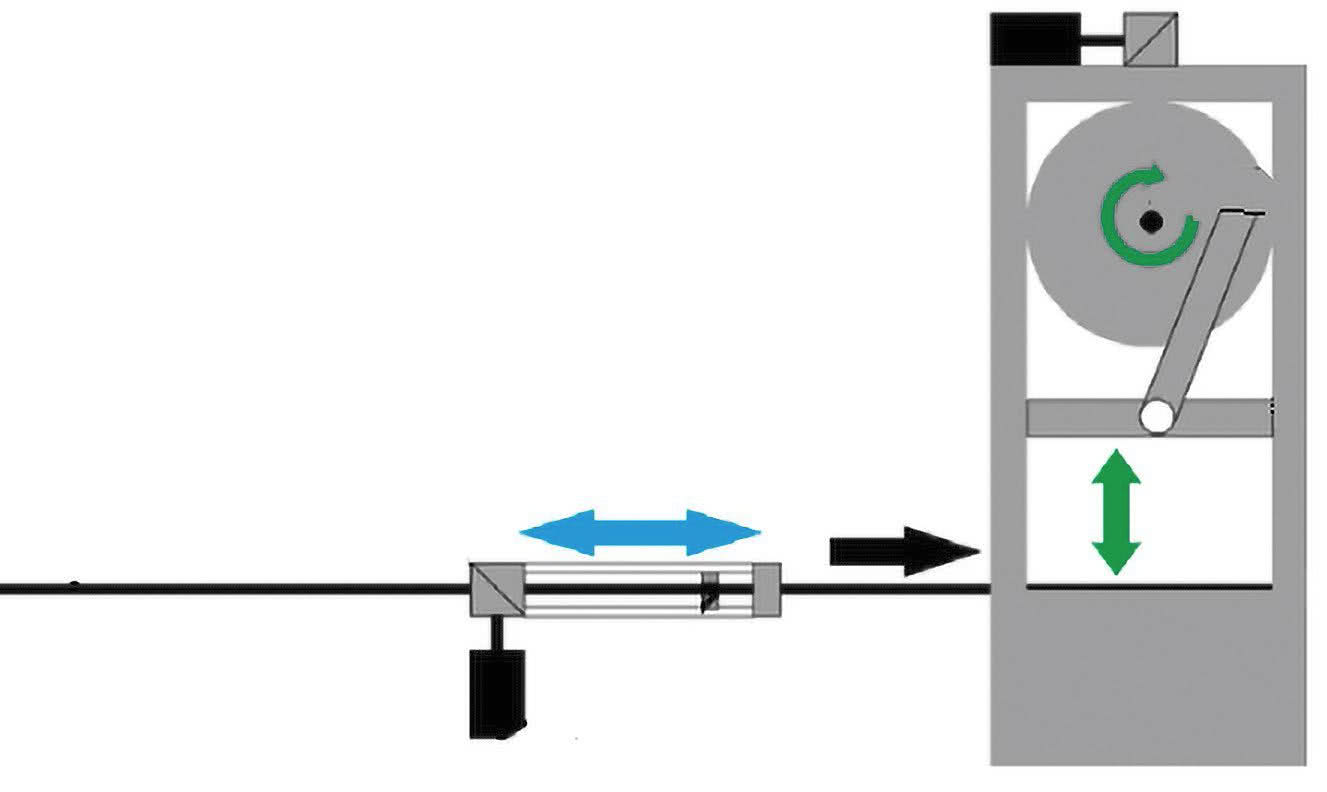
Krzywka elektroniczna ma wiele zastosowań. Sztandarową aplikacją sprzężenia krzywkowego jest zapewnienie nieliniowej synchronicznej relacji wielu osi. Jest to sposób alternatywny dla "zwykłej" synchronizacji pozwalający zrealizować stanowisko z latającą piłą albo obrotowym nożem. Innymi przykładami wykorzystania krzywki elektronicznej są: wycinarki laserowe oraz prasy (rys. 3). W tych ostatnich stempel jest dociskany do formy w momencie, w którym podajnik ze znakowanym materiałem znajduje się dokładnie pod nim. Wymaga to przekształcenia obrotowego ruchu wału napędowego na liniowe przesunięcie stempla i zsynchronizowania go przez jednostkę nadrzędną z napędem podajnika. Ten ostatni w czasie pojedynczego obrotu napędu stempla powinien przesunąć podajnik w przestrzeń roboczą prasy i zapewnić jego powrót do pozycji wyjściowej. |
CO WYRÓŻNIA ENKODERY ABSOLUTNE?
 Enkodery to przetworniki optyczne, w których promienie świetlne przechodzą przez szczeliny w zamontowanej na obrotowym wale tarczy szklanej lub wykonanej z tworzywa sztucznego i padają na fotodetektor. Ten przetwarza impulsy świetlne na sygnał elektryczny.
Enkodery to przetworniki optyczne, w których promienie świetlne przechodzą przez szczeliny w zamontowanej na obrotowym wale tarczy szklanej lub wykonanej z tworzywa sztucznego i padają na fotodetektor. Ten przetwarza impulsy świetlne na sygnał elektryczny.
W przypadku enkoderów inkrementalnych bezpośrednio jest śledzony jedynie ruch przyrostowy. Pozycja bezwzględna jest określana za pomocą dodatkowego fotoelementu, który odbiera impuls świetlny raz przy każdym obrocie. Jeżeli jednak zasilanie zostanie odłączone, wszystkie informacje są tracone.
W enkoderach drugiego rodzaju szczeliny na tarczy są rozmieszczone w taki sposób, żeby wynik pomiaru miał postać słowa kodowego, zazwyczaj w kodzie Graya, odpowiadającego konkretnemu położeniu wału. Po wyłączeniu zasilania enkoder absolutny zachowuje informację o pozycji, nawet jeżeli w tym czasie uległa ona zmianie. Zatem po ponownym uruchomieniu urządzenia aktualne położenie wału zawsze może być poprawnie odczytane. Dzięki temu maszyny z napędami z enkoderami absolutnymi nie wymagają bazowania po włączeniu zasilania.
Enkodery absolutne dzieli się na: jedno- i wieloobrotowe, które mierzą oprócz kąta obrotu również liczbę obrotów. Popularne rozwiązanie pośrednie stanowią enkodery inkrementalne z bateryjnym podtrzymaniem wartości.






























